
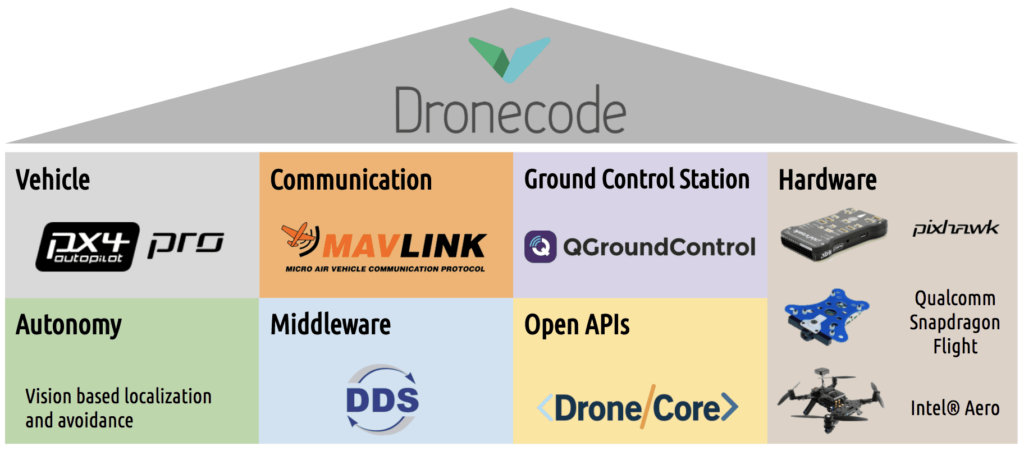
Dronecode’s goal is to become the leading open source platform for UAVs. The platform includes the core software components: PX4 (the core autopilot), MAVLink (the communication protocol between drone and the ground), and QGroundControl (the ground control station software). To ensure neutrality and transparency, Dronecode holds all trademarks of core projects.
Using compatible open source hardware like Pixhawk developers could build complete drones in a wide array of shape and airframes. We saw many of them created by our DIY community, by researchers at top universities, and by some of the most successful companies in the industry.
2017 saw the next step in the evolution to become a full software distribution with the addition of 3 key components:
- Autonomy: the next PX4 release includes some of the basic functionalities for vision-based localization and avoidance.
- Middleware: DDS, an industry standard, allows for fast communication between the autopilot and the companion computer and is a crucial enabler for full autonomy.
- Dronecore: the Dronecode SDK is the best way to integrate with PX4 and enable integrations and enhanced/advanced use cases.
Dronecode can be represented as the legal framework holding together all these efforts and unite them under a full software distribution for UAVs. This ensures that everything needed for a complete drone solution is delivered in a product that is well integrated, well tested, easily modifiable and is consistently licensed.
Please reach out to us if you want to contribute to the growing software platform and become part of our community-driven open governance model.
Resources:

