
October Newsletter.
Dear Dronecode Members,
September marks one of the most successful months in Dronecode’s history, thanks to the ever growing community and supporting members.
Read below to find all the news!
DroneCore the MAVLink API you’ve been waiting for.
Dronecode is excited to announce the creation DroneCore, our new open-source MAVLink Library for the PX4 flight stack.
 The library provides a simple core API for managing one or more vehicles, providing programmatic access to vehicle information and telemetry, and control over missions, movement and other operations. Developers can extend the library using plugins to add any other required MAVLink API.
The library provides a simple core API for managing one or more vehicles, providing programmatic access to vehicle information and telemetry, and control over missions, movement and other operations. Developers can extend the library using plugins to add any other required MAVLink API.
Reporting back from InterDrone
We are back from Vegas after a successful talk by Dr. Lorenz Meier and Ramón Roche our Program Manager. We are happy to report a very successful event, we met with some of our members and had very productive conversations with everyone from the industry.
On Thursday, September 7th we gave a talked titled: “The Complete End-to-End Open Source UAV Platform”, we promoted our platform and made clear our goals for the upcoming releases and made sure to promote our partners.

Dr. Lorenz Meier illustrates the Dronecode platform growth and showcases some of our member platforms.
Slides from our presentation at this years InterDrone marks the release of DroneCore and a great year for Dronecode and members.
U-Space Drone Traffic Management Takes Off in Switzerland

U-space is Europe’s vision for a traffic management system that will support safe, efficient, and secure access to European airspace for millions of drones. Like the U.S. “Unmanned Traffic Management” initiative, U-space is a collaborative effort to enable the integration of drones into the low-altitude airspace. On September 14th, Europe’s first live demonstration of U-space took place on Lake Geneva, Switzerland.
For Dronecode/PX4, the demonstration represents an important step forward in enabling the drone ecosystem, and in the integration through DroneCore with drone app and service providers like AirMap.
Meet our new members:


From their roots as a Swiss Startup, Wingtra has now spread its wings beyond the confines of Switzerland to the US, China and the rest of Europe. Wingtra’s surveying drone combines the ease of use of agile multicopters with the long range of high endurance fixed-wing aircrafts. Their fully-autonomous drone, called the WingtraOne, thrives on years of intelligent and meticulous research done at ETH Zurich in Switzerland.

We are proud to announce that My Drone Services Inc. joined Dronecode as a Silver member, My Drone Services is a company specialized in Drone Technology, they use Drones to deliver creative solutions to their clients.
“My Drone Services is both a commercial services provider and a supporter of Drones for Good. We are interested in the development of Drone Technology broadly because we see the benefits they can bring to clients and to the organizations which we support. We see the technology as a transformative, enhancing safety, making lives better. We also see the negative possibilities of drones placed in wrong hands.
We want to support the creation of open source technology which allows democratization of drone technology and widespread use for good.We are interested in this project because we wish to take active use of the underlying developments for use in our own client needs.” — Leon Shivamber, Chairman
Read more about My Drone Services.

PX4 1.7 Release.
The time is here for a new release of PX4, the dev team is targetting the release of 1.7 for the end of this month, we will begin to start testing release candidates as early as next week.
- Github Milestone – the dev team is doing a final pass through the milestone tracker to make sure we aren’t leaving anything behind and also assess which features should be delayed or cut from this release
- Release planning is happening on the dev call, as a reminder, the dev call happens weekly on Wednesdays at 8:00 AM PST
- There’s a workflow change proposal made by members of the core dev team, we are looking for feedback.
- The roadmap for the platform is found here, we are looking for feedback on the 1.7 & 1.8 releases
- As a reminder, once we start pushing release candidates we will turn the gears on our Flight Testing team, which means things are going to start moving quickly.
- Make sure you are planning ahead if there’s still features you would like to see in PX4 1.7.
Documentation updates.
Since our last newsletter, we’ve made many updates and additions to the documentation. A few highlights include:
- Autopilot hardware docs have moved into the PX4 User Guide here so PX4 users are better informed of flight controller options. The DevGuide was correspondingly updated to cross-link to this information and more clearly explain how to build for each target.
- Lots of DroneCore updates:
- New website: http://dronecore.io/
- New developer guide
- API reference generated from source
- Guide material in progress
Working group updates.
Most of the Working Groups are active and lots of progress has been made. Here is a brief overview.
- The camera API work is now being merged into QGC. Video streaming support is still in discussion.
- Status is at https://docs.google.com/
document/d/ 1sVPLlwJ0gX0oErBFd96_FSS_ mmHhb0h-N-JfoLN-oK8/edit# heading=h.i7btdrk1jebx - Camera API merged to QCG: https://github.com/
mavlink/qgroundcontrol/pull/ 5713 - Intel Aero Camera Daemon Support: https://github.com/
01org/camera-streaming-daemon/ pull/83
The SDK WG has made significant progress this month:
- The SDK strategy to support multiple vendors with customized SDKs based on DroneCore is still a work in progress on.
- An introspectable API is needed.
- Work is ongoing for gRPC support for multiple language bindings.
- Integration of DroneCore into more PX4 CI testing is TBD.
- The meeting has been postponed while several people were out on vacation.
- If the ROS 2 API’s are stable at the beginning of 2018, we can look at adding ROS 2 support to the Dronecode Platform.
- The messaging WG will also be working with the SDK WG to evolve the SDK in ways that may not work well over MAVLINK.
- The biggest missing piece of the RTPS support is broader testing.
- EProsima is going to have a look at this.
- The FAA Part 107 waiver application submitted by the Safety WG, which is the first to formally describe the Dronecode stack to begin the process of certification, has been submitted and is now being considered by the FAA.
- Group Activities has been suspended until WG participants have more time available to contribute.
Contributions.
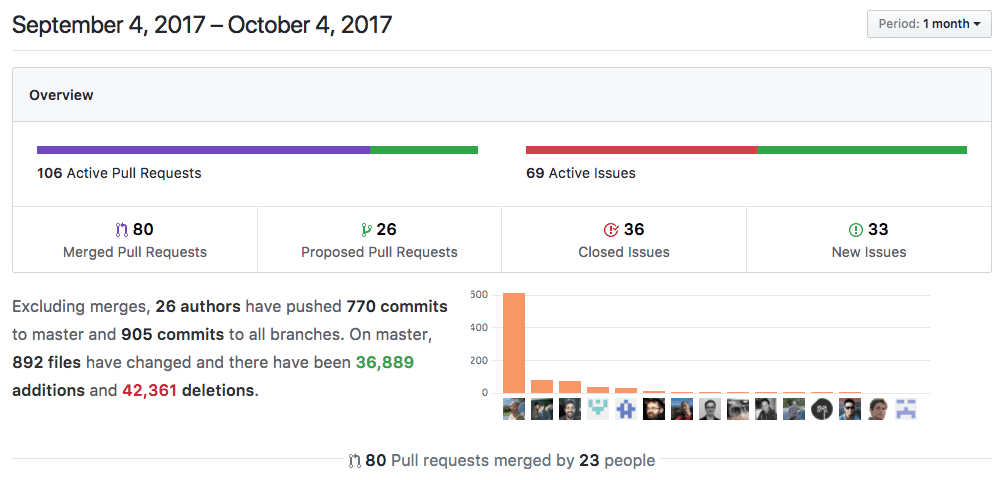
This month the project’s pulse shows we’ve merged 80 PRs (+26) and closed 36 issues (+4). 36,889 additions and 42,361 deletions.

Members of the Dronecode team.
THANK YOU!
Flight Testing.
These are the flight testing stats since the last newsletter (August 29 – September 26):
- 248 commits tested.
- 831 total flights.
- Pixhawk mini (DJI F450): 135
- Pixhawk 3 Pro (DJI F450): 160
- Pixracer (DJI F450): 192
- Pixhawk 1 (DJI F450): 164
- Pixhawk mini (Phantom FW): 39
- Pixhawk 3 Pro (VTOL): 23
- Snapdragon PWM-ESC (QAV 250): 31
- Intel Aero Ready To Fly Drone: 33
- Yuneec H520: 44
- 41 daily flights (average).
- 1 major issue found.
- 1 releases tested:
- 8 PR’s tested:
- https://github.com/PX4/
Firmware/pull/7744 - https://github.com/PX4/
Firmware/pull/7798 - https://github.com/PX4/
Firmware/pull/7855 - https://github.com/PX4/
Firmware/pull/7866 - https://github.com/PX4/
Firmware/pull/7882 - https://github.com/PX4/
Firmware/pull/7920 - https://github.com/PX4/
Firmware/pull/7960 - https://github.com/PX4/
Firmware/pull/7981
- https://github.com/PX4/
- 15 vehicles total.

