

This year at ROSCon 2025 in Singapore, the Dronecode community was out in full force. From hands-on learning sessions to live demos and technical discussions, we showcased how PX4 and ROS 2 continue to grow closer together.
Hands-On Aerial Robotics Workshop


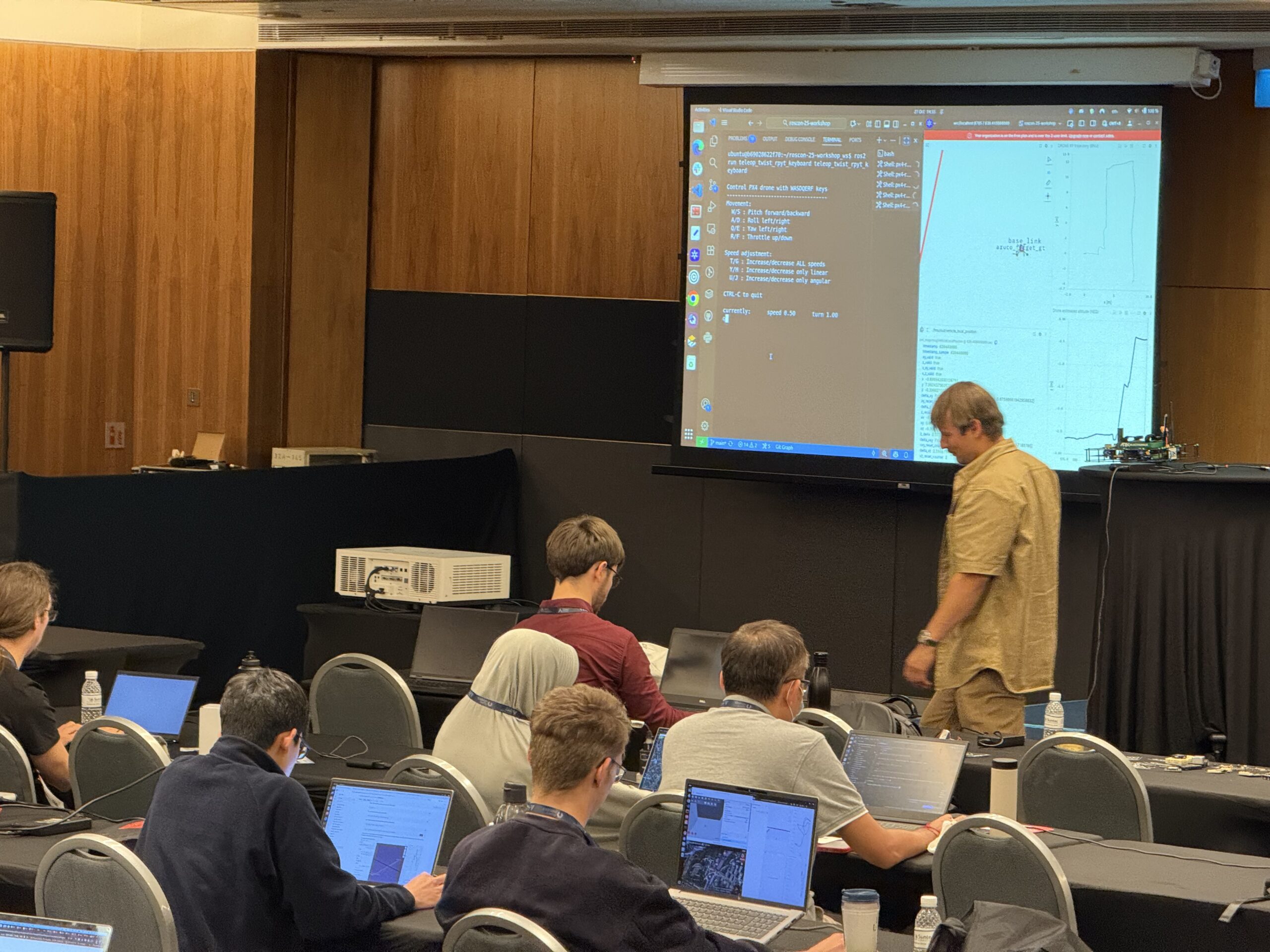



Our workshop “Hands-On Aerial Robotics with PX4 and ROS 2” was a full house with more than 60 participants completing all assignments successfully. Thanks to Patrik Dominik Pördi and Beniamino Pozzan for building and delivering the content, and to ARK Electronics for their partnership in making it happen. The session guided participants from simulation to full autonomy using PX4, ROS 2, Gazebo, and Foxglove.
Aerial Robotics Meetup



Later in the week, we hosted an Aerial Robotics Meetup that drew over 100 attendees. The four-hour event was packed with discussions, demos, and networking across the open robotics community. These conversations helped us align on upcoming collaborations, including deeper integration work with 03DE.
Showcasing Innovation Across the Ecosystem



ROSCon’s sponsor showcase featured several exciting PX4-powered demos. Benji Barash from Roboto AI demonstrated PX4 integrated with their analytics engine for physical AI. UVify presented their advanced Omega research platform, featuring the new Xeye visual odometry solution for ROS developers, with founder Hyon Lim and Robb Cheek leading the presentation. PX4 was also mentioned across multiple talks throughout the conference, underscoring its growing role in the broader ROS ecosystem.
PX4 Now in the ROS Distro
We also reached an important technical milestone: the first PX4 package was officially published to the ROS Rolling Ridley distribution, marking a major step toward easier integration between PX4 and ROS 2 for developers everywhere.
View the contribution on GitHub
Looking Ahead


We are already preparing to submit a new workshop proposal for ROSCon 2026 in Toronto (September 22 – 24). Our goal is to continue deepening collaboration with our sister ROS community and to make aerial robotics development even more accessible to researchers and engineers worldwide.
Open collaboration remains at the heart of everything we do. Thank you to everyone who joined us in Singapore and helped strengthen the bridge between PX4 and ROS 2

