
DRONECODE FOUNDATION
2025 Annual Report
Year In Review
2025 marked the year the PX4 ecosystem proved there are no bounds on its scale. The hardware landscape expanded rapidly, new players arrived from across industries and organization types, and recognition within the broader robotics field continued to grow. What started in a university lab is now a global ecosystem of projects trusted by governments, professionals, and researchers alike.
The foundation welcomed eight new members in 2025, reflecting the broadening appeal of open source across the industry. The new additions span swarm intelligence, long-endurance fixed-wing platforms, radar sensing, edge computing, integration services, airspace management, and defense manufacturing. What unites them is a shared belief that open standards and collaborative development accelerate innovation faster than any single company could achieve alone.
Major releases landed across the board. PX4 v1.16 shipped with redesigned rover support, new real-time capabilities, updated Gazebo support, and enhanced integration with ROS 2. QGroundControl hit v5.0 with a modernized interface and stronger security fit for new adverse operating environments. MAVSDK and MAVLink continued their steady march toward standardization. Each release reflects a decade of community investment paying dividends.
Fresh names climbed the contributor leaderboards alongside longtime maintainers. New voices emerged across all our projects. This is a testament to the dynamism of the PX4 ecosystem and that the path to meaningful contribution remains wide open.
Hardware options multiplied. 21 new boards from 14 manufacturers joined PX4 this year, pushing the total past 110 supported targets. The diversity spans tiny all-in-one flight controllers to enterprise-grade systems with onboard AI. More choices mean more developers can find the right fit.
The foundation hosted events across four continents: developer summits, hands-on workshops, and regional meetups from Atlanta to Singapore to Tokyo. Hundreds of developers, researchers, and industry partners came together to share knowledge and build relationships that extend far beyond any single conference.
When we look back at 2025, it’s clear that open source technology always goes beyond the moment. Every contribution compounds into something larger than any single release. The work happening now lays the foundation for capabilities we haven’t yet imagined. We can’t wait to see what you’ll build in 2026.
Executive Summary by

Mike Pehel
Marketing Lead @Dronecode
Testimonials From Our Community
GRASP Lab at University of Pennsylvania

“We are big fans of the PX4! We have been working on small autonomous aerial vehicles since 2010, but over the last 10 years, the PX4 has evolved into a key enabler for our platforms and our experimental ecosystem. We deploy a diverse fleet of robots, ranging from nano-UAVs for indoor operations to high-altitude UAVs for outdoor field robotics. The PX4 enables us to develop autonomous UAVs for cluttered, GPS-denied under-canopy forests, as well as teams of aerial and ground robots collaborating on large-scale missions.
 Vijay Kumar, Professor and Nemirovsky Family Dean, Penn Engineering.
Vijay Kumar, Professor and Nemirovsky Family Dean, Penn Engineering.Firestorm
Firestorm is a San Diego-based defense technology company building modular, mission-adaptable unmanned aerial systems for military applications. Founded in 2022, the company has secured over $100 million in Air Force contracts and $47 million in Series A funding to scale production of platforms like Tempest, their flagship Group 2/3 modular UAS, and xCell, an expeditionary “factory-in-a-box” that 3D prints drone airframes at the point of need. Their OCTRA flight controller stack runs PX4, and the company has built its entire architecture around open standards to eliminate vendor lock-in and enable rapid payload integration. Firestorm’s Head of Software Engineering, Nuno Marques, is a longtime PX4 contributor whose work spans the PX4 Autopilot, MAVLink, and QGroundControl projects.

“Firestorm’s platforms are designed for rapid iteration and modularity, so we need an autopilot ecosystem that’s both proven in the field and engineered for integration. PX4 gives us that foundation. Its modular architecture and open interfaces make it straightforward to build MOSA-by-design systems, where sensors, payloads, compute, and autonomy behaviors can be composed and upgraded quickly while keeping the flight stack maintainable and interoperable.
I’ve been involved with PX4 and related open-source projects for years, and I’ve seen firsthand how community-driven engineering accelerates reliability and capability. And that is why Firestorm is committed to continuing our support of Dronecode and open source because it’s the best way to advance safe, flexible autonomy and ensure the ecosystem remains healthy for everyone building on it.
 Nuno Marques, Head of Software Engineering, Firestorm. Member Since 2025
Nuno Marques, Head of Software Engineering, Firestorm. Member Since 2025UVify
UVify is a robotics company known for pioneering synchronized drone swarm technology, with their compact platforms powering coordinated multi-vehicle displays and research applications worldwide. Building on their swarm expertise, UVify has expanded into providing open hardware platforms for the PX4 ecosystem, including OMEGA (Open Modular Environment for General Autonomy) and IFO-S, which give developers and researchers a stable foundation for testing autonomy stacks across diverse configurations. Their Xeye visual odometry solution extends PX4’s capabilities into GPS-denied environments. UVify focuses on reducing integration friction so teams can spend less time on infrastructure and more time advancing autonomy.

“PX4 continues to be one of the most important building blocks in modern autonomy, and it has been a major accelerator for what we deliver at UVify.
With PX4, we can move from concept to functional prototypes in weeks, sometimes days, and turn that work into real in-field demonstrations that show tangible progress. Without PX4, testing cutting-edge autonomy would often require building an entire ecosystem from scratch before meaningful development could even begin. PX4 lets us focus immediately on the capabilities that matter most, then build and scale the supporting system around those needs.
Just as importantly, PX4’s versatility makes it far easier for us to develop one software solution and validate it across a wide range of drone platforms, saving time and resources while keeping compatibility front and center.
To help strengthen the ecosystem, we have also developed and provided open PX4 development platforms for the community: OMEGA (Open Modular Environment for General Autonomy) and IFO-S. We built these platforms to reduce integration friction and make it easier to iterate quickly on real hardware. They give developers, researchers, and integrators a stable, modular foundation for repeatable testing across sensors, payloads, and compute configurations, so teams can spend less time wrestling with infrastructure and more time advancing autonomy.
PX4 doesn’t just help us ship. It helps all of us innovate with confidence, and we are proud to support the PX4 community with platforms that make advanced autonomy more accessible, testable, and deployable.
Contribution Metrics
MEASURING IMPACT

17,979
Commits
3,325
Pull Requests
651
Contributors
99
Organizations
Total Unique Contributors
The Dronecode ecosystem delivered another strong year of open-source drone development, with 651 contributors and 99 organizations driving 17,979 commits and 3,325 pull requests across all projects. PX4 Autopilot remains the engine of the ecosystem with over 11,000 commits, while QGroundControl and MAVLink saw nearly 3,000 and over 1,800, respectively. Independent contributors top the chart, accounting for 28% of all contributions. Auterion (25%) and ARK Electronics (11%) lead organizational contributions, with Dronecode Foundation staff and Zenith Aerotech rounding out the top five. QGroundControl saw significant activity from Zenith Aerotech, and MAVSDK maintained steady development through the tireless work of Julian Oes. MAVLink was led by Blue Robotics Inc., which contributed 43%, showing continued investment. Hamish Wiley holds the honor of leading two projects in contributions, PX4 and MAVLink. The blend of major corporate investment and independent contributor effort keeps the ecosystem both stable and innovative heading into 2026.
Note: Definitions of Contribution and Contributors can be found on the F.A.Q. at the end of the report.
PROJECT ACTIVITY OVERVIEW
TOP CONTRIBUTING ORGANIZATIONS




Note on “Unaffiliated” contributors: 7,273 contributions (28%) came from contributors with no organization data available. Not all unaffiliated contributors are independent; some corporate affiliations are simply unreported
COMMUNITY TRAILBLAZERS
By the Numbers
Six Auterion engineers rank in the top 10 PX4 contributors for 2025. As a Platinum Member, the company provides both financial support and engineering leadership. CEO Dr. Lorenz Meier, who created PX4, serves as Dronecode Board Chairman, setting direction while his team ships code.
Auterion showed up in force at the 2025 PX4 Developer Summit with over a dozen speaking sessions covering flight control internals to safety certification. They build in the open and teach in the open.
The open-core model works here: commercial product, market competition, and still the biggest contributor to the commons. Their upstream investment means every PX4 user benefits from enterprise-grade improvements, customer or not.
A small hardware startup out of Salt Lake City, Utah, going head-to-head with bigger engineering teams, and winning. ARK Electronics landed as the second largest contributing organization to PX4 in 2025, shipping 11% of the project’s commits.
Jacob Dahl alone cracked the top 10 contributors, authoring everything from the Bidirectional DShot feature to IMU drivers and sensor fixes. And that’s just the code. What doesn’t show up in the commit stats is the hours spent answering questions on Discord, triaging issues on GitHub, joining weekly dev calls, and helping users debug their setups on the forums.
All of this while ARK was simultaneously shipping new hardware (the ARK FPV FC launched this year), supporting existing customers, and running a business. Most companies with far more resources contribute far less.
ARK proves you don’t need a massive engineering org to move the needle on open source. You need people who show up, ship code, and stick around to help when things break.
By the Numbers
TOP CONTRIBUTORS BY PROJECT
- Hamish Willee12.3%
- Jacob Dahl11.0%
- Ramon Roche7.6%
- Silvan Fuhrer6.5%
- Beat Küng4.6%
- Matthias Grob4.4%
- Mahima Yoga3.5%
- Alexander Lerach2.6%
- Daniel Agar2.6%
- Peter van der Perk2.6%
- Hamish Willee20.6%
- Patrick José Pereira15.1%
- João Antônio Cardoso13.1%
- Vladimir Ermakov8.9%
- Onur Özkan7.8%
- pv424.0%
- Peter Barker3.3%
- Julian Oes2.6%
- Christian Clauss2.5%
- Jacob Dahl1.9%
- Julian Oes74.7%
- Jonas Vautherin9.0%
- Aminballoon2.3%
- Christian Clauss2.1%
- Hamish Willee2.1%
- Luc-Meunier1.1%
- Matthieu Debeule0.9%
- reedev0.9%
- Jonathan Reeves0.6%
- Ryan Friedman0.5%
- Don Gagne39.7%
- Holden Ramsey39.0%
- Rubén Pérez Alonso2.9%
- Julian Oes2.4%
- Jacob Dahl1.8%
- David Sastre1.2%
- Gustavo Alvarado1.1%
- Ramon Roche1.0%
- Hamish Willee0.8%
- Niki-dev120.7%
Flight Testing Powered by Real Humans
PX4 v1.16.0 STABLE RELEASE TESTING
For v1.16, the Dronecode Test Team logged over 85 flights across multiple release candidates, testing on hardware ranging from Pixhawk 4 to the new Pixhawk 6X-RT and ARK V6X. Their work identified issues with precision landing, GPS injection, and QGC compatibility before these could reach the stable branch. This kind of real-world validation catches bugs that simulation alone cannot find.

Test Flights by Release Phases
RELEASE & PULL REQUEST TESTING

Flight Testing Services are provided by the Ascend Engineering team, a Dronecode Silver Member. Their dedicated test pilots perform both pull request validation and release candidate testing for PX4 Autopilot, flying real hardware through rigorous flight matrices before any stable release ships.
Every flight log, every crash report, every “something felt off” observation feeds back into the codebase. The result: safer, more reliable releases for the thousands of pilots and developers who depend on PX4 stable.
Looking to level up your own testing? If your organization needs flight validation beyond what’s covered in PX4 stable releases – custom integrations, proprietary configurations, or accelerated development cycles – the Ascend Engineering team offers comprehensive testing and development services built on top of the open source stack. They know the codebase inside and out, contribute upstream, and bring the same rigor to commercial engagements that they bring to community releases. Get in touch with Ascend Engineering →
Project Accomplishments

PX4 Autopilot
The PX4 Autopilot maintainer team released version 1.16, a major update building on the momentum of v1.15 with significant functional upgrades, new hardware support, and deeper developer integration. Key updates include:
- Rover Support Rework: A complete ground-up redesign of rover support with dedicated firmware and separate modules for Ackermann, differential, and mecanum rovers, all sharing a pure-pursuit guidance library for consistent path following.
- Bidirectional DShot Support: Native bidirectional DShot enables motors to send RPM data back to the flight controller on the same signal line, eliminating extra telemetry wiring and enabling closed-loop speed control.
- Gazebo Harmonic LTS: Replaced Gazebo Garden with Gazebo Harmonic, the long-term-support release, ensuring stable API, consistent physics behavior, and ongoing bug fixes.
- Dynamic ROS 2 Message Translation: A new translation node enables runtime translation of PX4 uORB messages between different versions, allowing mixed-version deployments without rebuilding.
- Seamless Log Encryption: Integrated ChaCha20-based log encryption with RSA key wrapping provides secure data handling directly within the log file format.
- Expanded Hardware Support: New board support including Auterion Skynode S, ARK FPV FC, NXP Tropic VMU, ZeroOne x6, CUAV 7-Nano, BlueRobotics Navigator, and 3DR Control Zero H7 OEM Rev G.
PX4 Autopilot
The PX4 Autopilot maintainer team released version 1.16, a major update building on the momentum of v1.15 with significant functional upgrades, new hardware support, and deeper developer integration. Key updates include:
- Rover Support Rework: A complete ground-up redesign of rover support with dedicated firmware and separate modules for Ackermann, differential, and mecanum rovers, all sharing a pure-pursuit guidance library for consistent path following.
- Bidirectional DShot Support: Native bidirectional DShot enables motors to send RPM data back to the flight controller on the same signal line, eliminating extra telemetry wiring and enabling closed-loop speed control.
- Gazebo Harmonic LTS: Replaced Gazebo Garden with Gazebo Harmonic, the long-term-support release, ensuring stable API, consistent physics behavior, and ongoing bug fixes.
- Dynamic ROS 2 Message Translation: A new translation node enables runtime translation of PX4 uORB messages between different versions, allowing mixed-version deployments without rebuilding.
- Seamless Log Encryption: Integrated ChaCha20-based log encryption with RSA key wrapping provides secure data handling directly within the log file format.
- Expanded Hardware Support: New board support including Auterion Skynode S, ARK FPV FC, NXP Tropic VMU, ZeroOne x6, CUAV 7-Nano, BlueRobotics Navigator, and 3DR Control Zero H7 OEM Rev G.
QGroundControl
QGroundControl (QGC) reached a major milestone with the release of v5.0 Stable, a comprehensive update built on Qt 6.8.3 with a modernized cmake build system:
Fly View Enhancements:
- Expandable Toolbar: Individual dropdowns can now be expanded with app/vehicle settings accessible without diving into complex configuration pages.
- Configurable Flight Modes: Remove unused flight modes from your list for a cleaner interface.
- Dynamic Battery Display: Bars with configurable thresholds for 100%, Config 1, Config 2, Low, and Critical levels.
- 3D View: Load OSM files as 3D maps for enhanced situational awareness.
- Improved Multi-Vehicle Support: Configurable telemetry display with better support for applying actions to all vehicles.
Additional Features:
- Plan View: Multiple fixed wing landing sequences can now be planned for different locations.
- MAVLink 2 Signing: Added support for secure MAVLink 2 communication.
- Configurable Stream Rates: Stream rate support for ArduPilot vehicles.
- Touch Screen Optimization: Focused UI updates for smaller screens like integrated controllers such as Herelink.
- GStreamer 1.22: Updated video streaming support.
MAVSDK
Key Improvements Throughout 2025 with MAVSDK v3:
- New MavlinkDirect Plugin: Runtime JSON API for any MAVLink message including custom messages that can be easily added using XML definitions. MavlinkDirect will eventually replace MavlinkPassthrough with MAVSDK v4.
- Improved MAVLink message forwarding: Unknown messages are now forwarded instead of dropped.
- Enhanced connection reliability: TCP reconnection fixes, improved error handling, connection error subscriptions, and raw connection support for custom transport layers.
- GPS origin setting: New method to set GPS origin.
- Configurable timeouts: Heartbeat timeouts can now be configured.
- Fuzz testing: Added fuzz tests to CI to improve security and robustness.
- Thread safety improvements: Extensive fixes for data races, mutex handling, and stack-use-after-free issues identified via thread sanitizer.
- Docs now in-tree and updated: The documentation source has moved into the MAVSDK repository to keep in sync, and has received various improvements, from bigger overhauls to small fixes.
MAVLink
MAVLink continues standardization efforts with impactful updates across its repositories, including 74 PRs merged in the mavlink/mavlink repo and 63 in Pymavlink (tools). Here are some of the standout highlights:
- Standard Modes Protocol: Now fully implemented in PX4 for multicopters and fixed-wing vehicles and partially in ArduPilot for copters, enabling flight mode control without needing flight stack-specific knowledge. (Continue Reading.)
- Camera Protocol Update: Support for targeting specific cameras in missions and handling up to 6 cameras or gimbals per flight stack. (Continue Reading.)
- GCS Vehicle and Component Ownership: Initial draft and prototype of a message protocol.
- Fuel and Battery Enhancements: Introduction of FUEL_STATUS for direct fuel level reporting, and BATTERY_INFO to replace SMART_BATTERY_INFO, improving clarity and eliminating workarounds.
- Thermal Detection: New CAMERA_THERMAL_RANGE feature for identifying hot spots in video feeds.
- Wind Estimation: Added MAV_CMD_EXTERNAL_WIND_ESTIMATE for enhanced dead-reckoning flights.
- Multiplier Values in Field Definitions: Allowing for scaling to be corrected on unitless values.
- Cleaner Protocols: Hygiene fixes to remove unused or WIP services, streamlining the protocol.
- Documentation Upgrade: Migration to VitePress for easier maintenance and a smoother user experience.
Developer Kits
Starling 2 & Starling 2 Max
The PX4 Autonomy Developer Kit has evolved into the ModalAI Starling series. Built on VOXL 2 with integrated depth sensors and preconfigured SLAM, the Starling 2 and Starling 2 Max deliver 40-55 minutes of autonomous flight time with full visual navigation out of the box. NDAA-compliant and ready for indoor/outdoor operation, these platforms are ideal for research, prototyping, and commercial applications. Learn more and purchase here.
IFO-S SWARM RESEARCH PLATFORM
The UVify IFO-S is a powerful development platform for drone autonomy and swarm research, offering full support for PX4 and ROS 2. Its lightweight, modular design and robust hardware, including a carbon fiber frame and brushless motors, make it ideal for prototyping and testing advanced algorithms. The IFO-S is well-suited for swarm research, enabling developers to explore multi-agent coordination, distributed control, and collaborative behaviors in drone swarms. Its compatibility with open-source frameworks provides a flexible and scalable solution for researchers and developers working on cutting-edge swarm robotics and autonomous systems. Learn more here.
Hardware Ecosystem Growth
NEW BOARDS ADDED TO PX4 IN 2025
21
New Boards
14
Manufacturers
5
CAN Peripherals
110+
Total Supported Boards
More Boards, More Options
The PX4 hardware ecosystem continued its rapid expansion in 2025, with 21 new board targets added to the codebase from 14 different manufacturers. These additions bring the total to over 110 supported boards across 40+ manufacturers, from commercial-grade autopilots to specialized CAN peripherals. This breadth of hardware support demonstrates why PX4 remains the most widely adopted open source flight stack in the industry.
FEATURED HARDWARE
NXP MR-TROPIC VMU
NXP’s MR-Tropic VMU represents a significant step forward in flight controller architecture, featuring the i.MX RT1176 crossover processor. This marks one of the first Pixhawk-standard boards to move beyond the traditional STM32 ecosystem, bringing NXP’s real-time processing capabilities to PX4.
Key Features:
- i.MX RT1176 crossover MCU with Cortex-M7 and Cortex-M4 cores
- Hardware security features for safety-critical applications
- High-speed connectivity including Ethernet
- Designed for advanced autonomy and compute-intensive workloads
- Demonstrates silicon vendor commitment to the Pixhawk ecosystem
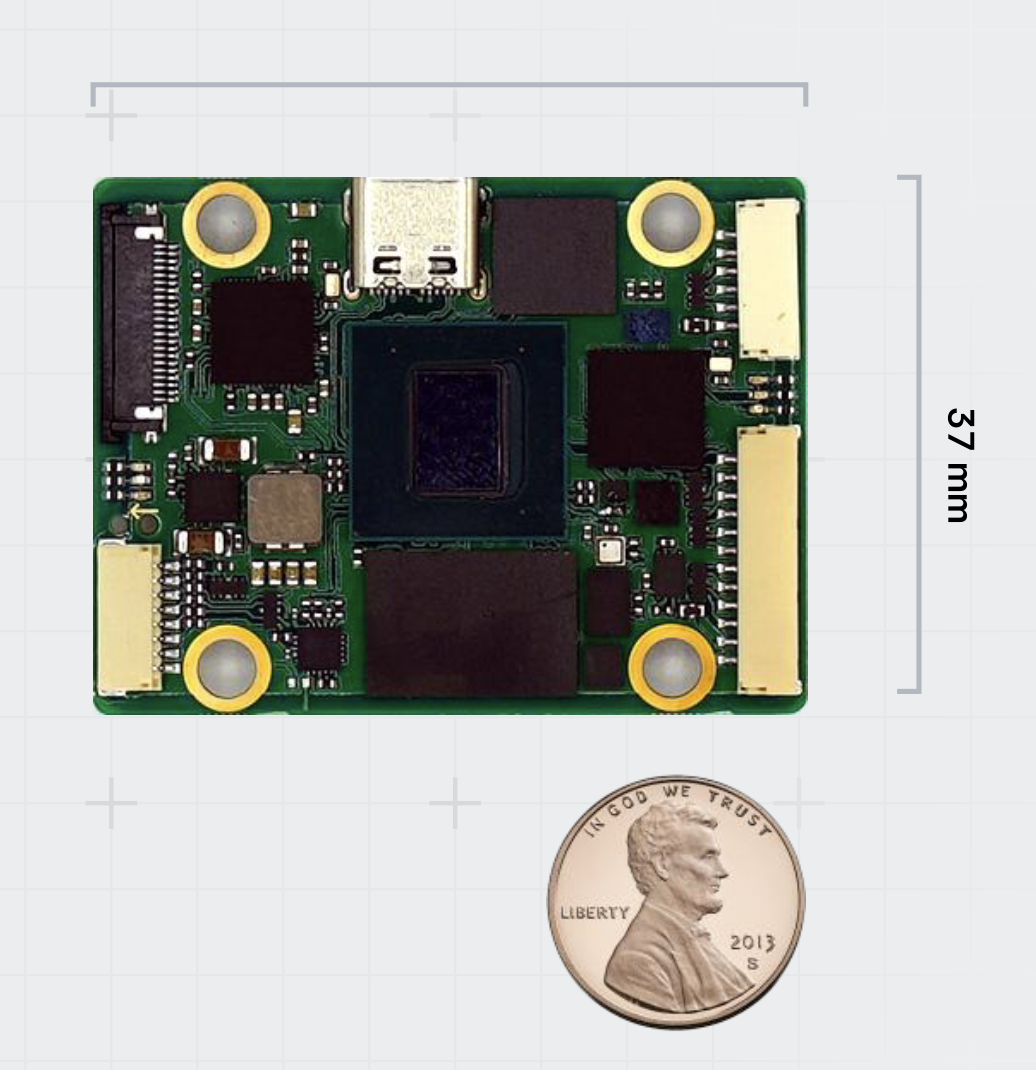
AUTERION SKYNODE S
The Skynode S packs Auterion’s commercial-grade platform into a remarkably compact 49mm × 39mm form factor. Combining a flight controller with an onboard mission computer and AI accelerator, it delivers edge computing capabilities without requiring a separate companion computer. At just 38 grams, it brings enterprise features to sub-2kg aircraft.
Key Features:
- ARM Cortex-A53 Quad Core @ 1.8GHz with 4GB LPDDR4 memory
- 2.3 TOPS NPU for onboard AI/ML inference
- Dual 1080p60 H.264/H.265 hardware video encoding
- 32GB eMMC storage for logs and applications
- 4-6W power consumption, supports 4S-8S batteries
- Standard 30.5mm mounting pattern
- AuterionOS with commercial PX4 distribution and Auterion Suite integration
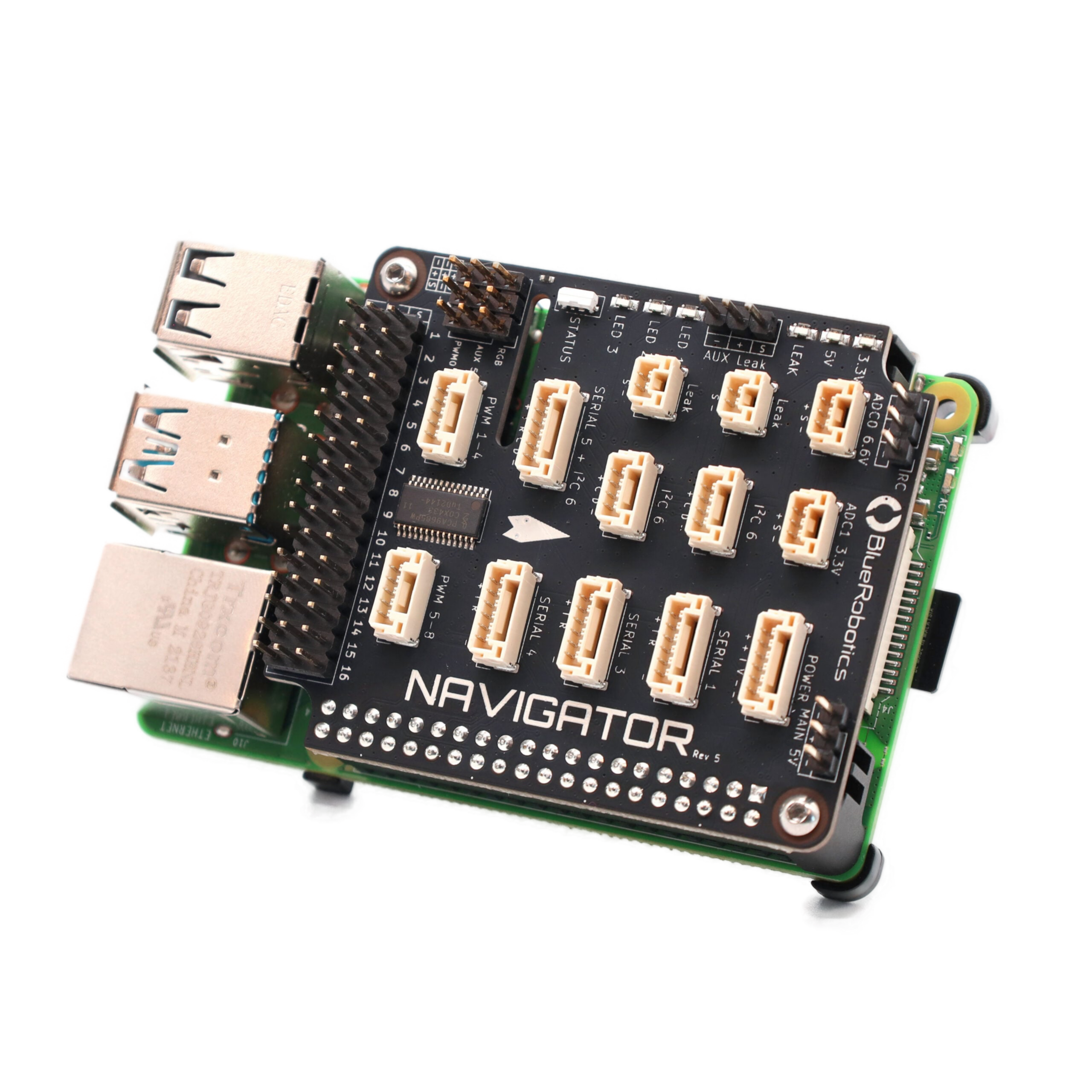
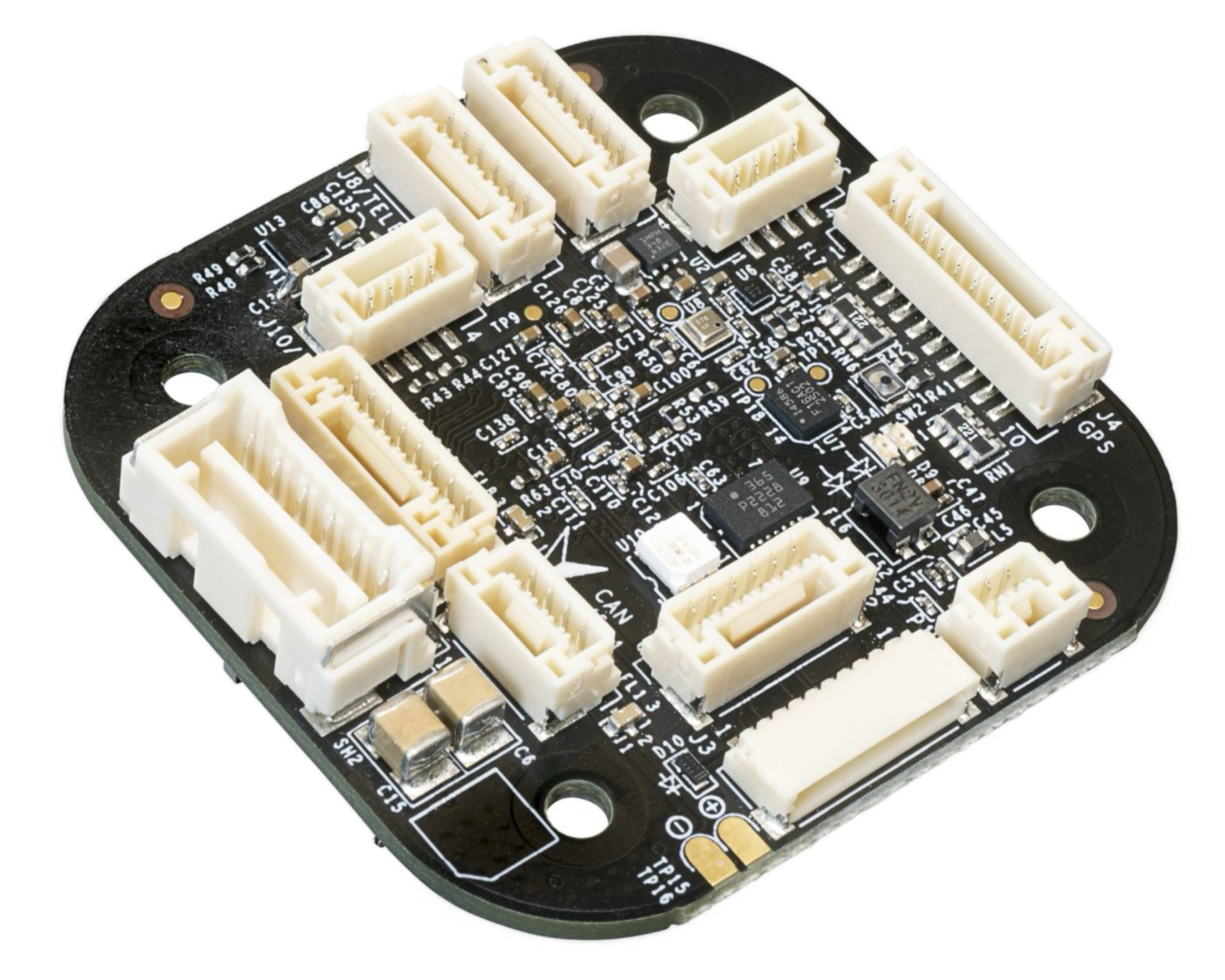
BLUE ROBOTICS NAVIGATOR
The Navigator brings PX4 to the underwater robotics community. This Raspberry Pi HAT enables the BlueROV2 and other marine platforms to run PX4 natively, bridging the gap between aerial and marine autonomy stacks. With official upstream support now in place, underwater developers can leverage the full PX4 ecosystem.
Key Features:
- Raspberry Pi HAT form factor
- Purpose-built for BlueROV2 integration
- Pressure sensor and marine-specific I/O
- Enables PX4 + ROS 2 underwater autonomy stack
- Opens PX4 to the marine robotics community
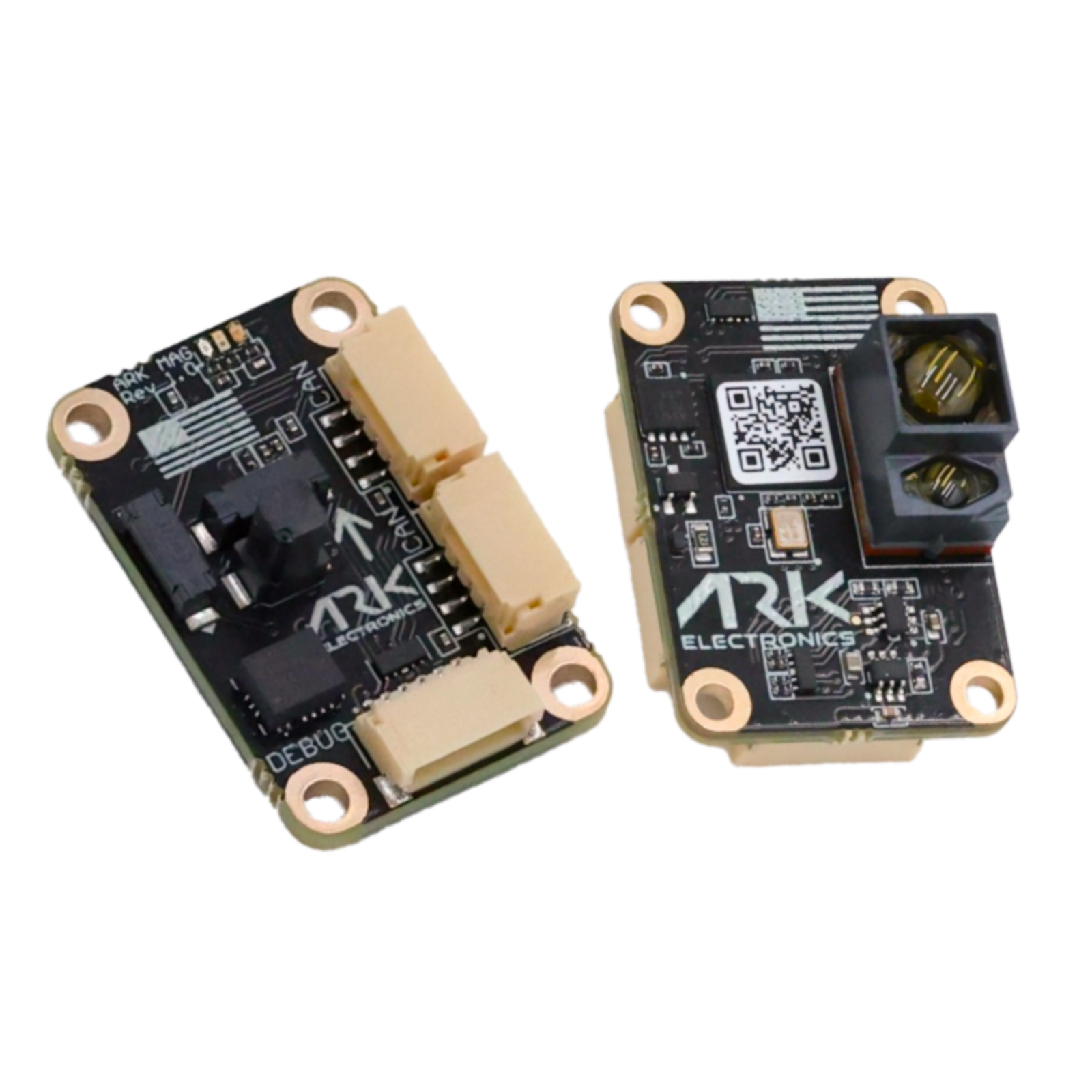
ARK ELECTRONICS CAN PERIPHERALS
ARK Electronics added four new DroneCAN peripherals to the PX4 ecosystem in 2025, extending the codebase beyond flight controllers into standardized sensor modules. These compact, CAN-bus connected devices simplify wiring and enable modular system architectures where sensors can be placed optimally without long analog signal runs.
New CAN Peripherals:
- ARK MAG – High-precision magnetometer
- ARK DIST SR – Short-range distance sensor (up to 30m)
- ARK DIST MR – Medium-range distance sensor (up to 50m)
- ARK F9P-GPS – u-blox F9P RTK GPS module
- ARK X20-GPS – High-precision GPS module
All ARK peripherals run PX4 firmware in CAN node mode, meaning they share the same open source codebase as the flight controller and receive updates through the standard DroneCAN bootloader. Compatible with any Pixhawk-standard autopilot.
2025 New Hardware Support Summary
From Silicon to Sky
| Manufacturer | Board | Type | Docs |
|---|---|---|---|
| Accton-Godwit | GA1 | Flight Controller | Link |
| ARK Electronics | DIST MR | CAN Peripheral | Link |
| DIST SR | CAN Peripheral | Link | |
| F9P-GPS | CAN Peripheral | Link | |
| MAG | CAN Peripheral | Link | |
| X20-GPS | CAN Peripheral | Link | |
| Auterion | Skynode S (FMU-V6S) | Flight Controller | Link |
| FMU-V6X | Flight Controller | Link | |
| Blue Robotics | Navigator | Companion Board | Link |
| Corvon | 743v1 | Flight Controller | — |
| CUAV | FMU-V6X | Flight Controller | Link |
| X25-EVO | Flight Controller | Link | |
| Holybro | Kakute H7 Dual IMU | Flight Controller | Link |
| Kakute H7-Wing | Flight Controller | Link | |
| MicoAir | H743-Lite | Flight Controller | Link |
| NarinFC | H7 | Flight Controller | — |
| NXP | MR-Tropic VMU | Flight Controller | Link |
| Radiolink | PIX6 | Flight Controller | Link |
| SVehicle | E2 | Flight Controller | Link |
| X-MAV | AP-H743r1 | Flight Controller | — |
| XC-Fly | XC-SLAM | Flight Controller | — |
Events
2025 was a banner year for Dronecode events. From coast-to-coast meetups across North America to major international conferences in Europe and Asia, the foundation hosted and participated in more events than ever before, bringing together hundreds of developers, researchers, and industry partners to advance open source autonomy.
PX4 Developer Summit 2025 - Atlanta
The PX4 Developer Summit returned in November 2025 at the Omni Atlanta Hotel at Centennial Park, bringing together nearly 200 developers, researchers, integrators, and industry partners for two days of technical sessions and community building. The summit featured a single-track format that kept the entire community focused, with sessions covering PX4 architecture, autonomy research, ROS 2 integration, GNSS and navigation technology, hardware platforms, middleware development, and developer tools. Keynotes from Ramón Roche, Hilary Carter (Senior VP Research, Linux Foundation), and Lorenz Meier (Founder and CEO, Auterion) set the stage for deep technical discussions. Before the main program opened, maintainers met to align roadmaps and set priorities for upcoming releases.








Open Source Summit Japan 2025 - Tokyo
The Dronecode Foundation brought its message of open source autonomy to Open Source Summit Japan 2025 in Tokyo. Ramón Roche, General Manager of the Dronecode Foundation, delivered a presentation titled “Dronecode: A Decade of Open Source Autonomy,” reflecting on ten years of building the world’s most widely adopted open source drone software ecosystem. The session traced the evolution from early PX4 development through today’s mature stack of projects powering commercial, research, and hobbyist applications worldwide.
The talk highlighted how community-driven development has shaped industry standards, from the Pixhawk hardware ecosystem to MAVLink communication protocols now used across hundreds of drone platforms. Attendees engaged with questions about integrating PX4 with ROS 2, contributing to upstream projects, and the foundation’s roadmap for the coming year.


ROSCon 2025 - Singapore
The Dronecode community was out in full force at ROSCon 2025 in Singapore. The highlight was a full-day workshop titled “Hands-On Aerial Robotics with PX4 and ROS 2,” which was a full house with more than 60 participants completing all assignments successfully. Led by Ramón Roche, Patrik Dominik Pördi, and Beniamino Pozzan, with partnership from ARK Electronics, the workshop guided attendees from simulation to full autonomy using PX4, ROS 2, Gazebo, and Foxglove.
Later in the week, the Aerial Robotics Meetup drew over 100 attendees for four hours of discussions, demos, and networking across the open robotics community. The sponsor showcase featured PX4-powered demos from Roboto AI and UVify, with their Omega research platform and new Xeye visual odometry solution on display.
Open Source Summit Europe 2025 - Amsterdam
Dronecode brought the story of open source autonomy to one of the biggest stages in open source at Open Source Summit Europe, held August 25–27 in Amsterdam. Ramón Roche, General Manager of the Dronecode Foundation, and Kimberly McGuire, Independent Roboticist, delivered a keynote presentation titled “Up, Up, and Away: Adventures in Aerial Robotics,” exploring the unique challenges facing flying robots from a developer perspective. A dedicated session on “Dronecode: A Decade of Open Source Autonomy” highlighted the foundation’s ten-year journey and its impact on the industry.


Dronecode + ROS Meetup - Los Angeles
On July 31, 2025, the Dronecode Foundation and OSRA hosted a joint meetup at NEROS Technologies headquarters in El Segundo, California, following the IEEE Space Mission IT conference. The event brought together contributors working across autonomy, robotics, and aerospace for an evening of lightning talks, live flight demos inside a secure test cage, and networking. Sessions included updates on the Dronecode stack from Ramón Roche, an introduction to Bagel—an open source AI robotics toolchain for querying robot logs—and insights into NEROS Technologies’ approach to building and testing autonomous systems.


Dronecode + Zephyr Meetup - Guadalajara
The first-ever joint Dronecode and Zephyr Project meetup took place on July 8, 2025, in Guadalajara, Mexico, hosted by NXP Semiconductor. Nearly 60 attendees from the Guadalajara metropolitan region gathered for an evening of embedded talks covering RTOS to flying robots. Ramón Roche opened with an overview of the Zephyr project, followed by Missael Maciel from NXP demonstrating Zephyr in action with live demos using NXP boards and VSCode plugins. The 3DR team showcased the newly released QZPro, a Zephyr and PX4-capable drone platform featuring multiple microcontrollers and MicroPython interface. This joint meetup proved that collaboration extends beyond individual projects, with multiple open source communities working together to expand possibilities for everyone.

Northeast Meetup - Philadelphia
The Northeast Meetup on March 26, 2025, at University of Pennsylvania Pennovation Works gathered PX4 community members, roboticists, engineers, students, and researchers for a day of technical presentations and networking. Ramón Roche kicked off the sessions with an exploration of PX4 Autopilot, emphasizing the importance of collaboration and open standards. The event featured a lineup of legendary speakers covering groundbreaking research and advanced real-world applications. Formal presentations concluded with live demonstrations at the Pennovation outdoor net, showcasing heavy-duty drone and satellite-navigated drone flights. Special thanks to Vijay Kumar (Nemirovsky Family Dean, SEAS) and Fernando Cladera for their work coordinating the event at UPenn.

South California Meetup - San Diego
The South California Meetup on February 19, 2025, in San Diego brought together drone enthusiasts, industry professionals, and open-source advocates. Sponsored by Dronecode and Firestorm, the event showcased the latest advancements in drone technology. Ramón Roche opened with an update on PX4 and the open-source ecosystem. Jackson Shultz and Jordan McMillan from Rainmaker presented groundbreaking work on high-altitude anti-icing quadrotors, discussing solutions for operating drones in extreme weather conditions. The event demonstrated the power of the Southern California region in driving the drone industry forward.
2025 Events Summary
Around The World and Back
| Event | Location | Date |
|---|---|---|
| South California Meetup | San Diego, CA, USA | February 19, 2025 |
| Northeast Meetup | Philadelphia, PA, USA | March 26, 2025 |
| Dronecode + Zephyr Meetup | Guadalajara, Mexico | July 8, 2025 |
| Dronecode + ROS Meetup | Los Angeles, CA, USA | July 31, 2025 |
| Open Source Summit Europe | Amsterdam, Netherlands | August 25-27, 2025 |
| ROSCon 2025 Workshop | Singapore | October 27, 2025 |
| ROSCon 2025 Aerial Robotics Meetup | Singapore | October 2025 |
| PX4 Developer Summit 2025 | Atlanta, GA, USA | November 10-11, 2025 |
| Open Source Summit Japan | Tokyo, Japan | December 8-10 2025 |
Funding
REVENUE SOURCES
The Dronecode Foundation’s revenue remains anchored by membership dues, which account for 59.64% of total income, up significantly from last year. Event sponsorships contribute 32.63%, reflecting continued industry investment in community gatherings like the PX4 Developer Summit. Registrations, a new line item capturing workshop and summit attendance fees, add 6.63%. Other revenue sources round out the remaining 1.10%.
59.64%
MEMBERSHIP REVENUE
32.63%
EVENTS SPONSORSHIP
6.63%
REGISTRATIONS
1.10%
OTHER REVENUE
EXPENDITURES
Leadership and coordination remains the foundation’s largest investment at 34.60%, covering strategic direction and governance across all projects. Events and sponsorships saw the biggest jump this year at 29.08%, reflecting expanded programming including ROSCon workshops, regional meetups, and the flagship Developer Summit. Operations accounts for 11.96%, while G&A holds steady at 9.21%. Marketing comes in at 8.98%, and legal and trademark protection rounds out the budget at 6.16%.
8.98%
MARKETING
29.08%
EVENTS & SPONSORSHIPS
6.16%
LEGAL & TRADEMARK
9.21%
G&A
34.60%
LEADERSHIP & COORDINATION
11.96%
OPERATIONS
Help Us Continue Growing
BECOME A MEMBER
110+ supported boards, 1,400+ contributors (in a single year). One ecosytem.
The companies building the future of autonomous systems are already here. Join them.
Get in touch: info@dronecode.org.
OUR MEMBERS
Platinum Members
Silver Members
![]()
![]()





![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
THANK YOU
“Seventeen thousand commits. Three major releases. Nine events across four continents. None of it happens without the people who show up, ship code, and stick around to help when things break. After a decade of building this together, I’m more convinced than ever: open source wins. See you in 2026.
To our members: your support keeps this mission funded and moving forward. We don’t take that for granted.”

Ramón Roche
General Manager @ Dronecode Foundation
F.A.Q.
How are metrics calculated?
Metrics are calculated by LFX Insights, a tool by the Linux Foundation that gives you complete visibility into project performance and ecosystem trends and allows you to understand the contributor communities and make informed decisions thanks to analytics and reporting tools.
How is the project value calculated?
We are using the COCOMO (Constructive Cost Model) to help estimate the effort, time and cost associated with the development of the projects taking into account project size, complexity, team experience and development environment.
What is the definition of a Contributor?
A contributor is defined as someone who makes a contribution. A contributor is either an unclaimed identity or a set of claimed identities (under a single user).
What's defined as a Contribution?
Contribution is a kind of activity depending on the data source type. We only consider activities on repositories that are not disabled and have insights enabled. Currently, the contribution is defined as any of the following:
- Authoring, Co-Authoring, or committing a git commit.
- Creating/Closing/Editing a Github issue.
- GitHub assignment.
- Creating/Closing/Merging/Editing a GitHub pull request.
- GitHub pull request assignment.
- Commenting on a GitHub pull request.
- Editing/Deleting a GitHub comment.
- Reviewing/Approving/Rejecting/Requesting changes on a GitHub pull request.
- Being requested a GitHub pull request reviewer.
- Pusher
- Watcher
Note: Various reaction types are not counted as contributions, such as GitHub reaction to comment/issue/PR
How is company affiliation determined?
Company affiliations are determined by the individual users, if you haven’t already done so we recommend you complete your LFX profile. Users can have multiple company affiliation. Each affiliation has:
- Date range affiliation starts on a given date and ends on a given date. Both the start and end dates can be unlimited.
- Project affiliations are specific to a project, so users can have different company affiliates for different projects.
- Organization.
User affiliations are defined at the user level, so they apply to all claimed identities of users.

