
By Ramón Roche, and Michael Pehel.
DRONECODE FOUNDATION
2024 Annual Report
Year In Review
In its landmark 10th year, the Dronecode Foundation celebrated a breakthrough year in technological innovation. Advances in flight controller architecture and autopilot capabilities demonstrate how the foundation’s vibrant ecosystem continues to push boundaries a decade later. 2024 will be remembered as a year of important progress that helped set the stage for an even better future, and we are so pleased to see truly phenomenal support across all our projects as they mature.
The foundation welcomed five new members in 2024, further diversifying its membership. These new additions represent the cutting edge of the industry, including companies specializing in advanced optical systems for aerospace applications, next-generation avionics systems, AI-enabled UAS solutions, and defense-focused unmanned systems manufacturing. This diverse range of new members demonstrates the PX4 ecosystem’s ongoing ability to attract both established players and innovative startups who see the strategic value in open standards and collaborative development.
2024 has been marked by significant technical achievements across the ecosystem. The introduction of the FMUv6X-RT standard, featuring the first NXP-based MCU on a Pixhawk, represents an awesome addition to the roster of flight controller options with its focus on real-time capabilities and security.
This advancement in hardware architecture is paralleled with the release of PX4 1.15 Stable, which brings enhanced autonomous navigation capabilities, improved sensor fusion, and improved ROS 2 integration. Add to those amazing releases, the brand new DEXI PX4 Developer Kit, and it is clear that PX4-based open technologies are getting into new hands every day.
MAVSDK reached version 3.0.0 this year bringing sophisticated new features and MAVLink’s continued standardization efforts have resulted in improved protocols for flight, camera, and vehicle management. Every step forward proves we are able to meet complex industry requirements and push beyond expectations.
Built through years of dedicated community contributions and collaborative development, the PX4 ecosystem has become a cornerstone of safe, secure, and efficient aerial robotics development and flight. It now reaches beyond that supporting form factors we could not have imagined a decade ago for land, sea, or air. The work of our maintainers, contributors, and member organizations stand as a testament to the power of open source and make all of this possible. Your support validates the foundation’s mission and allows us all to grow stronger together. We can’t wait to see what you’ll do in 2025!
Executive Summary by

Mike Pehel
Marketing Lead @Dronecode
A Brief History
A DECADE IN OPEN SOURCE

- 2009, Birth of the Pixhawk project
- 2011, Birth of PX4 Autopilot
- 2014, Formation of Dronecode Project, Inc. by founding members
- 2016, Birth of MAVSDK
- 2019, First PX4 Developer Summit in Switzerland
- 2021, Birth of Pixhawk Open Standards
- 2023, A total of 11,352 unique contributors across projects
- 2024, Celebrating our first decade together
- 2025, Setting Standards for the Industry
Testimonials From Our Community
Technology Innovation Institute
The Technology Innovation Institute (TII) is a leading global research center dedicated to pushing the frontiers of knowledge. Our teams of scientists, researchers and engineers work in an open, flexible and agile environment to deliver discovery science and transformative technologies. Our work means we will not only prepare for the future; we will create it. Working together, we are committed to inspiring innovation for a better tomorrow.

“Thanks to PX4, we can develop functional prototypes of new capabilities in just weeks or even days. This allows us to deliver in-field demonstrations and showcase tangible progress. Without PX4, testing cutting-edge technology would require building an entirely new ecosystem from scratch before we could even begin. With PX4, we can immediately focus on the aspects that excite our clients the most, and then seamlessly build the supporting ecosystem around it. Moreover, PX4’s versatility allows us to develop a single software solution and test it across a wide range of drones from different providers, saving both time and resources while ensuring compatibility.”
![]()
Dr. Michał Barciś, Lead Researcher, TII. Member since 2020
ModalAI
ModalAI is a technology company specializing in developing autonomous drones and robotics solutions. They focus on creating advanced AI-powered flight controllers, software, and hardware platforms that enable drones and robots to operate autonomously in complex environments. ModalAI’s products are widely used across the industry, emphasizing compact, efficient, and scalable solutions for real-world autonomy challenges.

“The PX4 ecosystem’s open architecture and modular design have helped foster a trusted hardware environment where our products like the VOXL 2 can thrive. Building the VOXL 2 to be optimized for PX4-based applications allows our clients to seamlessly integrate it with a wide array of sensors, payloads, and peripherals right out of the box. This enables us to focus on advancing autonomy and producing a best-in-class companion computer that brings unprecedented processing power to the edge.”
C had Sweet, CEO and Founder, ModalAI. Member Since 2019
had Sweet, CEO and Founder, ModalAI. Member Since 2019
Contribution Metrics
MEASURING IMPACT
 $1B Project Value
$1B Project Value
Combined project value
5 Projects
PX4, Pixhawk, MAVLink, MAVSDK, QGC
20 Members
Driving Worldwide Innovation
1,900+ Contributors
Growing Community of Contributors
Total Unique Contributors
The Dronecode ecosystem continues to thrive as a global hub for open-source drone innovation, with over 13,300 unique contributors and 1,900 new contributors in 2024 alone. This year’s statistics highlight the project’s immense scale, boasting 59.72 million lines of code and an estimated $1 billion in project value. Contributions are geographically diverse, with the United States (21%) and Switzerland (16%) leading the way, while organizations like Auterion (37.95%) drive the majority of activity. The PX4 Autopilot and MAVLink projects remain cornerstones, with thousands of commits, forks, and stars, showcasing the community’s commitment to advancing open drone technologies. The blend of veteran contributors and fresh talent ensures the ecosystem remains stable and innovative, solidifying its role as a leader in open-source drone development.
Note: Definitions of Contribution and Contributors can be found on the F.A.Q. at the end of the report.
Project Velocity 2024

Total Contributors Over Time

Where are users contributing from?

Top Contributing Countries
- United States – 21%
- Switzerland – 16%
- Australia – 8%
- Brazil – 6%
- China – 4%
- Germany – 4%
- United Kingdom – 4%
- New Zealand – 4%
- Belgium – 3%
- Netherlands – 3%
Top Contributing Organization

Single Top Contributing Organization
37.95%
Top 10 Affiliations
- Self-Employed / No Affiliation – 41.19%
- Auterion – 37.95%
- Blue Robotics – 3.88%
- ESRI – 3.73%
- ARK Electronics – 2.60%
- ETH Zurich – 2.05%
- Dronecode Foundation – 1.63%
- Japan Drones – 0.68%
- ModalAI – 0.59%
- Firestorm – 0.50%
Top Contributors by Project
PX4 Autopilot
Global Stats
- 903 Contributors
- 2,202 Commits
- 392 Issues
- 1,724 Pull Requests
- 2,252 Forks
- 2,569 Stars
Top 10 Contributors
- Daniel Agar – 13.60%
- Hamish Willee – 13.28%
- Mathieu Bresciani – 6.70%
- Silvan Fuhrer – 5.65%
- Beat Küng – 5.35%
- Matthias Grob – 5.12%
- Julian Oes – 3.60%
- David Sidrane – 3.14%
- Jaeyoung Lim – 1.99%
- Jacob Dahl – 1.98%
MAVLink
Global Stats
- 390 Contributors
- 1,832 Commits
- 181 Issues
- 314 Pull Requests
- 421 Forks
- 766 Stars
Top 10 Contributors
- Hamish Willee – 18.27%
- Patrick José Pereira – 11.61%
- Julian Oes – 10.37%
- João Antônio Cardoso – 9.81%
- Don Gagne – 8.70%
- Holden – 6.60%
- Vladimir Ermakov – 3.85%
- Peter Barker – 1.91%
- Beat Küng – 1.45%
- David Sastre – 2.38%
MAVSDK
Global Stats
- 221 Contributors
- 466 Commits
- 214 Issues
- 257 Pull Requests
- 132 Forks
- 261 Stars
Top 10 Contributors
- Julian Oes – 49.88%
- Jonas Vautherin – 15.17%
- rayw-dronesense – 2.64%
- Abdur-Rahman – 2.03%
- Beat Küng – 1.94%
- Jacob Dahl – 1.39%
- Ba0Nguyen – 1.10%
- NotEasyLeh – 1.02%
- Karthik Arumugham – 0.99%
- Ibrahim – 0.75%
QGroundControl
Global Stats
- 452 Contributors
- 916 Commits
- 468 Issues
- 796 Pull Requests
- 732 Forks
- 766 Stars
Top 10 Contributors
- Don Gagne – 32.43%
- Holden – 32.42%
- Julian Oes – 3.77%
- David Sastre – 2.36%
- Beat Küng – 1.27%
- Omid Esrafilian – 1.10%
- Sam Gillam – 0.72%
- Sergii Lisvenko – 0.70%
- Randy Mackay – 0.68%
- Bartek Zdanowski – 0.59%
Project Accomplishment
PX4 Autopilot
The PX4 Autopilot maintainer team released version 1.15, introducing a range of enhancements and new features. Key updates include:
- Improved ROS 2 Integration: Improvements to ROS 2 and uXRCE-DDS integration streamline communication between PX4 and robotic systems, making developers’ workflows smoother.
- Expanded Hardware Support: New drivers and sensor integrations broaden the range of compatible hardware, offering more options for diverse applications.
- Refined Navigation: Updates to navigation algorithms provide more precise and reliable flight control.
- Experimental Throw Mode: Introduces the ability to launch multicopters by simply tossing them into the air, simplifying takeoff procedures.
- Position Slow Mode: This is a new flight mode that allows for reduced-speed operations, ideal for precise maneuvers in confined spaces.
- Gazebo Simulation Improvements: Enhanced support for the Gazebo simulator provides a more robust environment for testing and development.

Pixhawk
The Pixhawk SIG members announced the addition of the Pixhawk FMUv6X-RT standard to its lineup, marking a significant advancement in drone flight controller technology. This standard built upon the FMUv6X platform and introduced powerful capabilities for real-time applications. At its core, the NXP IMX RT1176 processor brings enhanced processing power and real-time performance to the Pixhawk ecosystem. The FMUv6X-RT boasts several key features, including the first NXP-based MCU on a Pixhawk, an integrated secure element for secure authentication, an Ethernet interface for advanced mission computer integration, and triple redundancy with completely isolated sensor domains. It also incorporated an advanced sensor suite with redundant IMUs, compass, pressure sensors, dual GPS support, and a high-accuracy barometric sensor. This standard represented a collaborative effort from the Pixhawk Special Interest Group and was developed through extensive discussions and technical workshops during FMU Workgroup meetings. The FMUv6X-RT standard documentation was made available for download from the Pixhawk GitHub repository, making it accessible to all interested parties in the drone industry.
QGroundControl
QGroundControl (QGC) introduced significant updates in its recent v4.4 and upcoming v5.0 versions:
Version 4.4 Highlights:
- Gimbal Control: Integration of the MAVLink gimbal v2 protocol enables seamless gimbal management, ensuring compatibility with PX4 and ArduPilot systems.
- Terrain Following: Introduction of terrain following capabilities utilizing the new Auterion server, enhancing flight safety and mission planning.
- Minor Enhancements: Inclusion of several minor stability and performance fixes.
Planned Features for Version 5.0:
- Transition to Qt 6.8: Upgrading to Qt 6.8 aims to provide a stable Long-Term Support (LTS) version, ensuring longevity and reliability.
- Build System Overhaul: Shifting from qmake to CMake to modernize and streamline the build process.’
- User Interface Enhancements:
- Tablet/Touch Support: Major UI changes to improve usability on tablet devices and touch interfaces.
- Simplified Settings Access: Enabling more straightforward access to frequently changed settings directly from toolbar items.
- Incremental Improvements: Ongoing UI/UX and source code refinements to enhance user experience and system performance.
MAVSDK
Last year, the MAVSDK team and its active community of contributors worked on new features that just made it into the v3.0.0 release, bringing a host of significant improvements and new features:
- Enhanced Connection Syntax: The connection interface has been refined for more straightforward and flexible configurations.
- Camera Plugin Overhaul: Redesigned to seamlessly support multiple cameras, enhancing versatility in various applications.
- Gimbal Plugin Redesign: Updated to accommodate multiple gimbals, providing greater control and integration capabilities.
- Base64 Encoding for RTK and Log Streaming: Implemented base64 encoding for Real-Time Kinematic (RTK) data and log streaming, ensuring efficient and reliable data transmission.
- Deprecation of Obsolete MAVLink Messages: Removed various outdated MAVLink messages and related workarounds, streamlining communication protocols.
- Introduction of Events Plugin: A new plugin designed to handle events, offering a more structured approach to event management within MAVSDK.
MAVLink
MAVLink continues standardization efforts with impactful updates across its repositories, including 74 PRs merged in the mavlink/mavlink repo and 63 in Pymavlink (tools). Here are some of the standout highlights:
- Standard Modes Protocol: Now fully implemented in PX4 for multicopters and fixed-wing vehicles and partially in ArduPilot for copters, enabling flight mode control without needing flight stack-specific knowledge. (Continue Reading.)
- Camera Protocol Update: Support for targeting specific cameras in missions and handling up to 6 cameras or gimbals per flight stack. (Continue Reading.)
- GCS Vehicle and Component Ownership: Initial draft and prototype of a message protocol.
- Fuel and Battery Enhancements: Introduction of FUEL_STATUS for direct fuel level reporting, and BATTERY_INFO to replace SMART_BATTERY_INFO, improving clarity and eliminating workarounds.
- Thermal Detection: New CAMERA_THERMAL_RANGE feature for identifying hot spots in video feeds.
- Wind Estimation: Added MAV_CMD_EXTERNAL_WIND_ESTIMATE for enhanced dead-reckoning flights.
- Multiplier Values in Field Definitions: Allowing for scaling to be corrected on unitless values.
- Cleaner Protocols: Hygiene fixes to remove unused or WIP services, streamlining the protocol.
- Documentation Upgrade: Migration to VitePress for easier maintenance and a smoother user experience.
Latest Pixhawk Hardware
HOLYBRO PIXHAWK 6X-RT

The Pixhawk 6X-RT is based on the Pixhawk® FMUv6X-RT Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with PX4 Autopilot® pre-installed. Inside the Pixhawk 6X-RT flight controller, you can find an NXP-based i.MXRT1176 MCU, paired with sensor technology from Bosch® and InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle.
Development Hardware
DEXI PX4 DEVELOPER KIT
DEXI is a fully programmable, customizable, and modular drone that students will build from the ground up. DEXI introduces a groundbreaking all-in-one flight controller running PX4 Autopilot that integrates optical flow sensing for incredibly accurate positioning while flying indoors or in GPS-denied areas. Complete with onboard computing capabilities, a PI camera, and access to GPIO, the possibilities are endless. Developed in partnership with members of the Dronecode Foundation DroneBlocks and ARK Electronics, in collaboration with Momentum Drones. Learn more and purchase here »
PX4 AUTONOMY DEVELOPER KIT
The PX4 Autonomy Developer Kit by ModalAI is a versatile hardware platform designed for advanced drone development and autonomy applications. It features a powerful VOXL 2 flight controller, integrated depth sensors, and PX4 and ROS 2 support, enabling developers to build and test autonomous drone systems efficiently. The kit is ideal for research, prototyping, and commercial projects, offering robust performance and seamless integration with open-source software ecosystems. Learn more and purchase here.
IFO-S SWARM RESEARCH PLATFORM
The UVify IFO-S is a powerful development platform for drone autonomy and swarm research, offering full support for PX4 and ROS 2. Its lightweight, modular design and robust hardware, including a carbon fiber frame and brushless motors, make it ideal for prototyping and testing advanced algorithms. The IFO-S is well-suited for swarm research, enabling developers to explore multi-agent coordination, distributed control, and collaborative behaviors in drone swarms. Its compatibility with open-source frameworks provides a flexible and scalable solution for researchers and developers working on cutting-edge swarm robotics and autonomous systems. Learn more here.
Beyond the Flight Controller
ARK JETSON PAB CARRIER ARKV6X BUNDLE
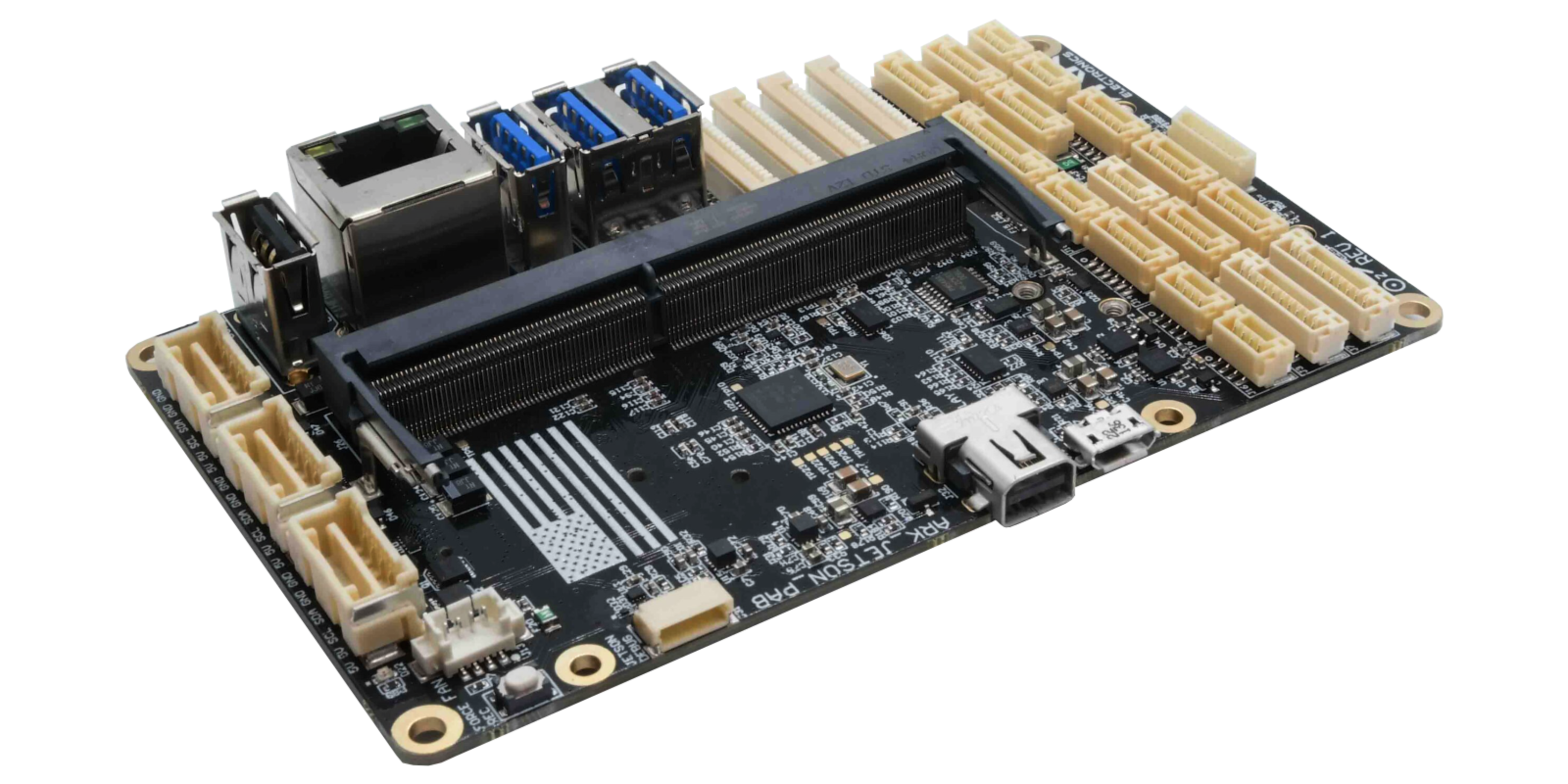
The ARK Jetson PAB Carrier + ARKv6X Bundle is a comprehensive solution for advanced robotics, AI, and autonomous systems. This bundle combines the power of the ARK Jetson PAB Carrier and the flexibility of the ARKv6X Flight Controller, providing unmatched performance, reliability, and integration capabilities for demanding applications between PX4 and ROS 2.
Key Features:
- NDAA Compliant, built in the USA.
- Follows Pixhawk open standards with advanced FMUv6X architecture.
- Features high-performance processors and precision sensors for accurate navigation and stability.
- Designed for NVIDIA Jetson modules, including Jetson Nano, Xavier NX, and Orin NX.
- Supports high-speed connectivity, including USB 3.0, HDMI, Ethernet, and CSI camera interfaces.
- Compatible with Pixhawk PAB-based flight controllers.
HOLYBRO PIXHAWK JETSON BASEBOARD BUNDLE
The Pixhawk Jetson Baseboard Bundle by Holybro is a powerful and versatile platform designed to bridge the capabilities of Pixhawk flight controllers and NVIDIA Jetson modules. It is perfect for aerial robotics developers looking to pair PX4 with ROS 2, facilitated by seamless communication between the advanced AI compute module and the high-precision flight control system.
Key Features:
- Combines the power of Pixhawk & Nvidia Jetson in a single board.
- Nvidia Jetson & Pixhawk connected via UART, CAN, and ethernet switch.
- Compatible with Jetson Orin NX & Orin Nano.
- Supports high-speed connectivity, including USB 3.0, HDMI, Ethernet, and CSI camera interfaces.
- Compatible with Pixhawk PAB-based flight controllers.

Events
NATO-Ukraine Defence Innovators Forum 2024 - Krakow
The Defense Innovation Unit organized the UAS Visual Guidance Hackathon at the NATO-Ukraine Defence Innovators Forum. It brought together 13 international teams to develop innovative solutions for UAS navigation systems in GPS-denied environments. Teams worked day and night for 48 hours to rapidly prototype technologies that can maintain effectiveness in complex environments and limited resources. The hackathon demonstrated NATO’s commitment to technological advancement through international collaboration, specifically focusing on real-world challenges in UAS operations.



Open Source Meetup at Xponential 2024 - San Diego
The Open Source Meetup at Xponential 2024 gathered 40 open source community members in San Diego for an evening of networking. Hosted at Bub’s at the Ballpark from 7:30 p.m. to 10:30 p.m. on Wednesday, April 24, the event was jointly sponsored by ARK Electronics and Dronecode Foundation. The meetup provided an opportunity for attendees of Xponential 2024 to discuss developments in open source robotics and strengthen community connections.
ICRA 2024 - Yokohama
The Dronecode team met with Jaeyoung Lim, a PX4 maintainer, following his award win at ICRA 2024 in Yokohama, Japan. The discussion celebrated his innovative work on drone autonomy, particularly his research on robust perception systems for challenging environments, as detailed in his paper (arXiv:2405.02011).

Aerial Robotics Meetup at ROSCon 2024 - Odense
The Aerial Robotics Meetup at ROSCon 2024 convoked 90-100 professionals and enthusiasts at Storms Pakhus in Odense, Denmark on October 21st at night. Hosted by the ROS Aerial Robotics Workgroup Community Group and sponsored by the Dronecode Foundation, attendees enjoyed appetizers and drinks while networking and exchanging insights about aerial robotics development. The venue’s diverse selection of bars and food trucks provided an engaging backdrop for community building.

Turkey User Group Meetup - Istanbul
The first Turkey Dronecode Community Meetup was held on October 19th in Istanbul, bringing together enthusiasts, developers, and professionals to discuss Dronecode advancements, collaboration, and practical applications. Hosted by passionate community members, the event fostered networking, knowledge-sharing, and a vibrant exploration of drone technology’s future. As the inaugural meetup, it laid the groundwork for future events, highlighting Turkey’s growing drone community and its innovation potential.
Funding
REVENUE SOURCES
The Dronecode Foundation derives its revenue primarily from memberships, contributing 50.34% of the total income, making it the largest funding source. Event sponsorships follow closely, accounting for 46.55% of revenue and playing a significant role in supporting the foundation’s activities. Additionally, the recently introduced Pixhawk validation services generate 3.06% of the revenue, while minor contributions, categorized as “Other,” make up 0.07%. These diverse revenue streams collectively enable the foundation to advance its mission and sustain its operations.

50.32%
MEMBERSHIP REVENUE
46.55%
EVENTS SPONSORSHIP
3.06%
PIXHAWK SERVICES
0.07%
OTHER (YOUTUBE)
EXPENDITURES
The Dronecode Foundation allocates its expenditures across various key areas to support its mission and operations. The largest portion, 38.34%, is dedicated to leadership and coordination, ensuring effective governance and strategic direction. Marketing and business development account for 14.19%, while general and administrative costs make up 14.12%, covering essential operational needs. Events receive 10% of the budget, fostering community engagement and collaboration, and legal expenses also account for 10.10%, ensuring compliance and risk management. Additionally, 11.35% is allocated to operations, maintaining the foundation’s infrastructure, and 1.90% is directed toward developer collaboration, supporting innovation and technical advancements within the community. These expenditures reflect a balanced approach to sustaining and growing the foundation’s impact.

38.34%
LEADERSHIP & COORDINATION
14.19%
MARKETING
14.12%
G&A
11.35%
OPERATIONS
10.10%
LEGAL
10.0%
EVENTS
1.9%
DEVELOPER COLLABORATION
Help Us Continue Growing
BECOME A MEMBER
Become Dronecode’s latest member or learn other ways you can show the open source community your support by connecting with us today!
For any specific inquiries, please get in touch with the Dronecode Foundation at info@dronecode.org.
Book 1:1 Time with Dronecode
THANK YOU
“Open source innovation flourishes through the shared dedication of our global developer community. Every contribution to the PX4 ecosystem—whether it’s spreading awareness, writing code, or providing resources—helps strengthen the foundation for future generations of drone developers. Together, we’re building a robust platform that empowers creators to bring groundbreaking projects to life. Thank you for being an essential part of this journey!”

Ramón Roche
General Manager @ Dronecode Foundation
F.A.Q.
How are metrics calculated?
Metrics are calculated by LFX Insights, a tool by the Linux Foundation that gives you complete visibility into project performance and ecosystem trends and allows you to understand the contributor communities and make informed decisions thanks to analytics and reporting tools.
How is the project value calculated?
We are using the COCOMO (Constructive Cost Model) to help estimate the effort, time and cost associated with the development of the projects taking into account project size, complexity, team experience and development environment.
What is the definition of a Contributor?
A contributor is defined as someone who makes a contribution. A contributor is either an unclaimed identity or a set of claimed identities (under a single user).
What’s defined as a Contribution?
Contribution is a kind of activity depending on the data source type. We only consider activities on repositories that are not disabled and have insights enabled. Currently, the contribution is defined as any of the following:
- Authoring, Co-Authoring, or committing a git commit.
- Creating/Closing/Editing a Github issue.
- GitHub assignment.
- Creating/Closing/Merging/Editing a GitHub pull request.
- GitHub pull request assignment.
- Commenting on a GitHub pull request.
- Editing/Deleting a GitHub comment.
- Reviewing/Approving/Rejecting/Requesting changes on a GitHub pull request.
- Being requested a GitHub pull request reviewer.
- Pusher
- Watcher
Note: Various reaction types are not counted as contributions, such as GitHub reaction to comment/issue/PR
How is company affiliation determined?
Company affiliations are determined by the individual users, if you haven’t already done so we recommend you complete your LFX profile. Users can have multiple company affiliation. Each affiliation has:
- Date range affiliation starts on a given date and ends on a given date. Both the start and end dates can be unlimited.
- Project affiliations are specific to a project, so users can have different company affiliates for different projects.
- Organization.
User affiliations are defined at the user level, so they apply to all claimed identities of users.

