
The Low Orbit Helium Assisted Navigator (LOHAN) project is a high-altitude, rocket-powered UAV project, featuring the 3D-printed Vulture 2 aircraft. The Vulture 2 will be suspended under a helium-filled meteorological balloon, with an electronic trigger programmed to fire the solid rocket motor at a predetermined altitude.
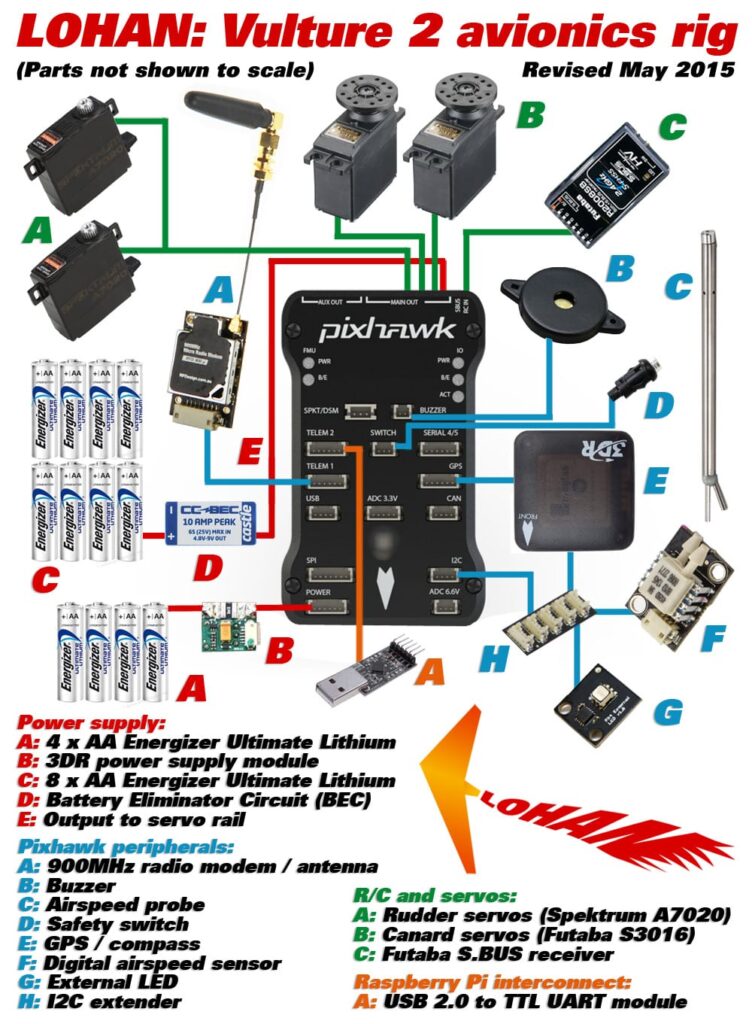
Vulture 2 avioncs rig schematic
The mission profile requires some custom parameters for the the Vulture 2’s Pixhawk autopilot, running APM:Plane. Enter Andrew Tridgell, he of 2014 Outback Challenge fame, who’s very kindly being doing the legwork on this part of the project.
Here’s some of what we’ve implemented to date:
- Startup in AUTO mode:
We have added a new ArduPilot INITIAL_MODE parameter for what mode to boot into. For LOHAN it will be AUTO.
- MAV_CMD_NAV_ASCEND_WAIT
Ascend wait will be an AUTO mode command that is used to wait for the Vulture 2 to ascend to the needed altitude, wiggling servos on the way. While ascending the servos will move through their full range every wiggle_time seconds. This is to prevent the servos from freezing solid at temperatures as low as -50 degC. This command will complete when one of the following conditions is met: vehicle is descending at higher than a set speed, vehicle sees an X acceleration above a given threshold (rocket has fired).
- Accel detection
We have a new ACC_HOLD_THRESH parameter in m/s/s. If the X acceleration is ever above that level in AUTO mode then the vehicle will move servos to the trim position and hold them there for ACC_HOLD_TIME seconds (we will use 20 seconds). This parameter will operate whenever in AUTO mode.
- MAV_CMD_NAV_LOITER_DESCEND
The MAV_CMD_NAV_LOITER_DESCEND command will be used during the primary descent of the vehicle after the rocket has fired. It will take a target latitude/longitude a target altitude and a loiter radius. The vehicle will fly towards the target lat/lon then circle at that position until its altitude drops below the given altitude target. At that point the mission will continue.
- Autotune in AUTO mode
We have a new MAV_CMD_DO_ENABLE_AUTOTUNE while will enable autotuning during AUTO flight. This mission command will be just before the LOITER_DESCEND stage of the flight. It will then disable when LOITER_DESCEND has finished. This will allow the aircraft to use automatic PID tuning while descending.
We’ve pretty well wrapped all of the Vulture 2 testing, including sending a full avionics rig to 30,000m to check the servo and battery function, and we’re now just waiting on the FAA to give us the green light for a launch from Spaceport America, New Mexico.
Hopefully, some of the groundbreaking work we’ve been doing will be of future use to people in the Droneshare community, and we’re happy to be contributing to the advancement of open source UAV software.

From L-R, LOHAN team members Drew Cullen, Rob Eastwood, Paul Shackleton, Dave Akerman and Anthony Stirk
Full LOHAN coverage: http://reg.cx/1Uyg
Our last test flight (Codename PRATCHETT): http://reg.cx/2fQj
ABOUT THE AUTHOR OF THIS POST

I’m head of Special Projects for The Register, with a Guinness World Record for the highest launch of a paper plane under my belt. Before turning to tech journalism, I was a cameraman/surveillance photographer for the BBC and other TV outlets, working for Panorama, World in Action and Macintyre Undercover back in the good old days of analogue photography. I once owned a Sinclair ZX81 with 16K RAM module, and have happy memories of BASIC.

