November Newsletter.
Dear Dronecode Members,
Read below to find all the news!
Meet our new members.
![]()
Traffic awareness and collision avoidance technology for UAVs (and other aircraft). With FLARM installed, the vehicle is alerted of both traffic and imminent collisions with other aircraft, so action can be taken before it is too late.
![]()
Advanced, fully programmable, flight controller hardware and a development platform for swarming UAV systems.
Dronecode present at DARPA Hackfest in NASA Ames

In November, Dronecode participated in the four-day DARPA Hackfest at NASA Ames in Mountain View, CA. The objective of the Hackfest was to use open source drones and software-defined radios (SDRs) to improve communications and security in multi-drone missions. Using 3DR Solos, RaspberryPis and Ettus B200 radios, teams set out to accomplish three missions: range extension, handoff from one ground control station to another, and advanced payload integration. Dronecode Chairman Chris Anderson keynoted the event and presented on how the teams’ work aligned with the overall Dronecode roadmap and how to continue participating with the Dronecode teams after the hackfest.
Dronecode China Roadshow 2017

Early next month we are planning on a tour of China to meet with our member companies and extend the ecosystem with new partners and developers from China, we are still finalizing the plans for this trip and will send a follow-up email with more concrete information.
If you would like to schedule a meeting or participate in our tour send us an email at conference@px4.io with your company name and contact details.
Weekly Developer Call.
Our weekly developer call happens every Wednesday at 5 pm CET (UTC +1), join our core developer team and members of the community and shape the direction of PX4.
Ever had a question you wanted to ask the developers of PX4? would you like to see a topic addressed by the community? The weekly call is the just the place for such questions, add your topics to the weekly agenda and join us at the meeting, we will make sure your voice is heard.
Our weekly agenda is posted on our discourse forums under the weekly-dev-call category, where you will find the dial-in address and this weeks agenda.
Join us on Slack.

Are you a member of our online community on Slack yet? Don’t get left out and join the developer team plus more than 500 Dronecode Platform developers on Slack or ever-growing community where you will find out the latest news and will be able to interact with like-minded developers and companies from the ecosystem.
What are you waiting for? join today for free on http://slack.px4.io/ and if you are already a member don’t forget to say hi on #general and explore all of our available channels.
PX4 1.7 Release (Almost There!)
We are almost ready to release the next stable version of PX4, this one took a few more weeks than we expected but we are taking our time to ensure the safety and stability of our release, you can review the current open items on our milestone below.
- Github Milestone – the dev team is doing a final pass through the milestone tracker to make sure we aren’t leaving anything behind and also assess which features should be delayed or cut from this release
- Release planning is happening on the dev call, as a reminder, the dev call happens weekly on Wednesdays at 8:00 AM PST
- There’s a workflow change proposal made by members of the core dev team, we are looking for feedback.
- The roadmap for the platform is found here, we are looking for feedback on the 1.7 & 1.8 releases
Documentation updates.
Since our last newsletter, we’ve made many updates and additions to the documentation. A few highlights include:
- Addition of a new header bar across all DroneCore sites and documentation, making it easier to navigate between the different platform resources.
- Started cleaning up the legacy QGroundControl site. All old QGroundControl documents have been migrated to the new libraries or deleted (MAVLink docs still to be ported).
- Major update to Korean translations of DevGuide catches up 4 months of changes.
Working group updates.
Most of the Working Groups are active and lots of progress has been made. Here is a brief overview.
- Camera control protocol changes have been merged into to QGroundControl.
- Intel to share details of drone apps processor code – https://github.com/01org/camera-streaming-daemon
- SITL camera module development
- Proposed design in progress- https://docs.google.com/document/d/1kO76jjzYUoPWLmHh6GNb2AVWQLo_A9ZCtZaboYj2-Kk/edit?usp=sharing
- Gets frames from Gazebo camera
- Video Streaming
- Mavlink messages for video streaming delayed until docs for camera control complete
The SDK WG has made significant progress this month:
- Dronecore gRPC bindings moving forward for multiple language support
- Docker image to be created for development using Dronecore
- Documentation of DroneCore C++ API moving forward and has near-complete coverage.
- Need a software designer look at the design of DroneCore for vendor extensibility.
- PX4 1.8 Needs to support extensibility
- Offboard Control API added
- PR for API documentation: https://github.com/dronecore/docs/pull/53
- The messaging WG will also be working with the SDK WG to evolve the SDK in ways that may not work well over MAVLINK.
- The biggest missing piece of the RTPS support is broader testing
- eProsima is going to have a look at this.
- The VIO samples using RTPS should be completed
- RTPS refactoring
- https://github.com/PX4/Firmware/pull/8113
- Serialization code should be pre-generated in its own layer so the Agent code need not depend on all of Firmware and its submodules
- FAA Application for Dronecode stack certification with Intel. Upcoming calls, but still moving forward.
- FAA not concerned with security but other agencies are (ala DJI). Talking to other agencies about security issues (XCOM, Dept of Interior, EPA, etc).
- Concern voiced about safety of a platform not addressing platform security and data security
- Threat analysis needed
- Opportunity for transparent process of how data is handled by the platform
- Discussed using ROS2 security model and also supporting proprietary solutions (e.g. FLIR, INSITU)
- Progress in Code Quality is being made on several fronts:
- Architecture Refactoring
- NuttX update that was previously blocking other refactoring work has been merged
- I2C NuttX drivers are now cross-platform via vdev. SPI devices not supported yet (missing a handful of things in drivers/device).
- PX4 v1.8 release targeted for refactoring the drivers to use vdev and hopefully moving DriverFramework drivers to use vdev.
- Rearchitecture proposals for vendor layers were prototyped and provided for comments
- Latest one is here: https://github.com/PX4/Firmware/issues/8127
- Proposal for Offboard Module Architecture
- HW Support
- Not clear to new users what HW platform they should start with
- List what is known good HW
- RPi – best effort vs Intel Aero (supported)
- Need new categories
- Experimental HW
- Unmaintained HW (mfg’s who create non-compliant products, poor build quality)
- Supported HW
- Need quality standards for HW vendors to self-certify
- Test infrastructure
- Significant work on test infrastructure to allow scaling of automated testing. Work in progress.
- Group Activities has been suspended until WG participants have more time available to contribute.
Flight testing.
These are the flight testing stats since the last newsletter (July 28 – August 28):
- These are the flight testing stats since the last newsletter (Sep 27 – October 31):
- 756 commits tested.
- 1205 total flights.
- Pixhawk mini (DJI F450): 258
- Pixhawk 3 Pro (DJI F450): 274
- Pixracer (DJI F450): 208
- Pixhawk 1 (DJI F450): 294
- Pixhawk mini (Phantom FW): 49
- Pixhawk 3 Pro (VTOL): 12
- Snapdragon PWM-ESC (QAV 250): 30
- Intel Aero Ready To Fly Drone: 23
- Yuneec H520: 55
- 50 daily flights (average).
- 1 major issues found.
- 4 PR’s tested:
- 16 vehicles total.
Contributions.
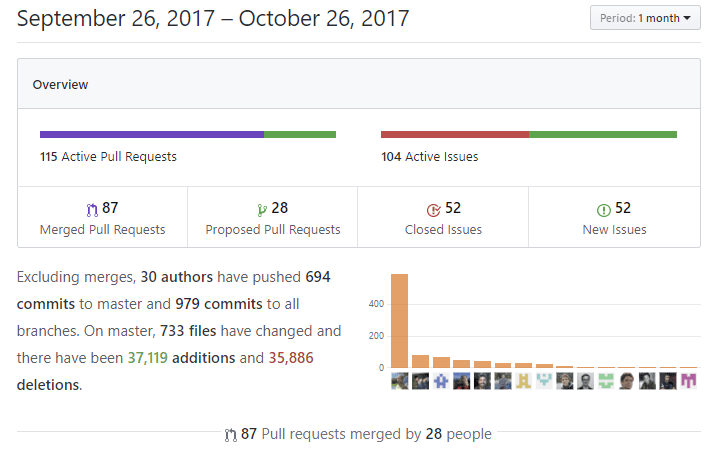
This month the project pulse shows we’ve merged 87 PRs (+7) and closed 52 issues (+16). 37119 lines were added and 35886 were deleted.

Members of the Dronecode team.